2024-06-25 基礎生物学研究所, 同志社大学
基礎生物学研究所 神経行動学研究部門の西海望 研究員、同志社大学の藤岡慧明 特任研究員准教授(研究開発推進機構)および飛龍志津子 教授(生命医科学部)は、コウモリが逃げ回る獲物を超音波で捕捉する際に複数の戦術を調和させ照準精度を劇的に高めていることを明らかにしました。そして、複数の戦術を運用する上での統合的な制御方針を提起しました。
物体を視野内に捉え続ける「目標トラッキング」の能力は、動物が生きていく上で重要な役割を果たしています。感覚にはどうしても遅れが伴う中で、どのように動物はこれを解決し、精度の良いトラッキングを成り立たせているのかを明らかにすべく、本研究では優れた追尾能力を持つニホンキクガシラコウモリを対象に、その目標トラッキングの戦略構造を調べました。その結果、本種は「①目標方向の予測」、「②スキャンレートの高速化」、「③スキャン範囲の拡大」、「④目標方向の安定化」という4つの戦術を同時に展開することで、感覚の遅延を補い、劇的にトラッキング精度を改善させていることが判明しました。その一方で、複数戦術の同時展開は個体にマルチタスクを課すため、実際に運用するには相当の困難さがあると考えられます。これをコウモリがどのように克服しているのか分析した結果、各戦術は単一の運動パラメータへの反応に集約できることが明らかになりました。つまり一見複数のタスクを負っているようで、実はコウモリはタスクをうまくまとめあげ、負荷を低減していることが示唆されました。
以上の結果から、コウモリが逃げる目標をいかにうまく捉え続けているのかが明らかになりました。トラッキング時の感覚の遅延の問題は、コウモリに限らず様々な動物、そしてセンシング機器にも通ずるものです。そのため、本研究成果は、動物におけるセンシング能力の進化の理解に示唆を与えるばかりか、センシング機器に対しても工学的な示唆を与えることになると期待されます。
本研究は、国際学術誌 「Current Biology」に日本時間2024年6月25日に掲載されました。
 【研究の背景】
【研究の背景】
物体を注視し視野内に捉え続ける「目標トラッキング」の能力は、私たちの日々の様々な活動において重要です。そして、この能力は人間や他の生き物においてだけでなく、カメラ・レーダーなどのセンシング機器においても重要であり、車の自動運転やロケットの弾道計算など様々な場面で、物体を継続的に観測する際に大きな役割を果たしています。こうした重要性から、このトラッキング能力は、それぞれ生命進化や技術開発の歴史を経て高度に発展してきたと言えます。しかしながらそれでも、動物も機械もトラッキングの際には共通して「感覚の遅延」の問題から逃れられずにいます。これは、情報の伝達や処理に必ずある程度の時間がかかるせいで、リアルタイムの情報を得ることができないということを指します。そのため、目標の位置を知覚した時点では最早その情報は過去のものになっていて、今この瞬間の目標の位置は異なるところにある場合があります。こうしたことから、この遅延の悪影響をいかに軽減し、トラッキング精度を向上させるかが、目標トラッキングにおける一般的な課題となっています。
自然に目を向けると、コウモリは優れた飛行能力と独特のエコロケーション能力で、複雑に逃げる獲物でも巧みに捕らえることができています。この事実は、コウモリが獲物の位置を絶えず正確にトラッキングし続けることにおいて高い能力を有していると言えます。つまり、コウモリは何らかの方法で、目標トラッキングにおける遅延の問題をうまく克服していることが示唆されるわけです。研究グループはこの点に着目し、コウモリが目標の位置を捕捉し続ける上で、どのような工夫がなされているのか調べました。
【研究の成果】
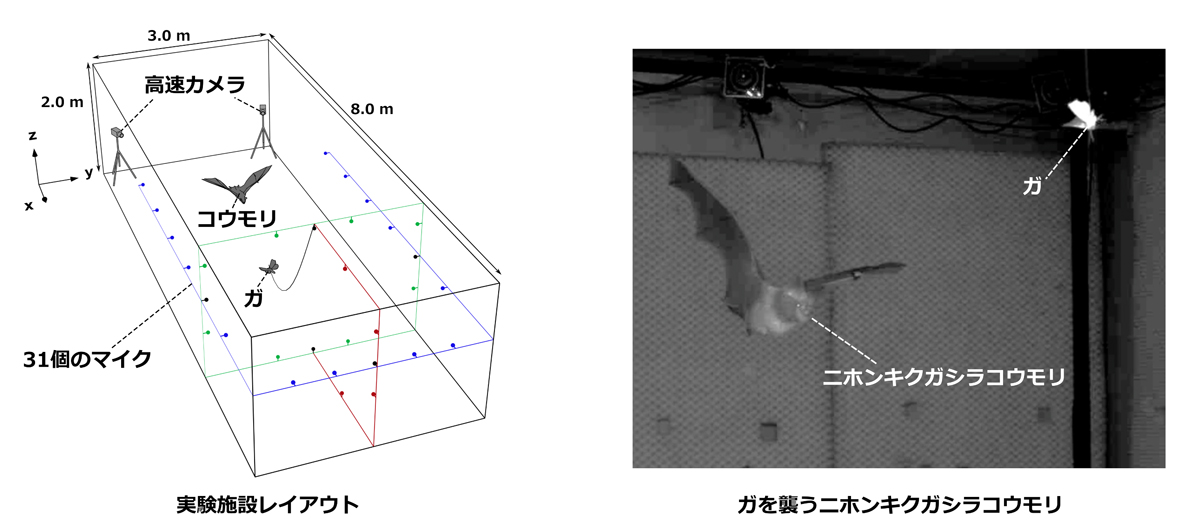
本研究は、2010、2011年に収集されたニホンキクガシラコウモリが蛾を襲う際の行動記録を再解析することによって進められました。この記録は、室内実験下でコウモリの飛行経路を高速カメラで計測し、同時に実験室内に多数配置されたマイクから、コウモリの超音波照射の状態を割り出した内容となります(下図)。これらを全て、動画解析の段階から改めて高精度で定量化しなおし、3次元運動解析とコンピュータシミュレーションを駆使することで、以下のことが明らかになりました。
コウモリはどのような戦術を用いているのか?
コウモリは超音波制御または飛行制御で構成される以下4つの独特の戦術を同時展開していることが判明しました。
※参考動画:https://youtu.be/ptj2TvnsVNk
コンピュータグラフィックスによって、 ニホンキクガシラコウモリの視点で再構成された目標トラッキング時の様相。一連の戦術について簡潔な説明付き。
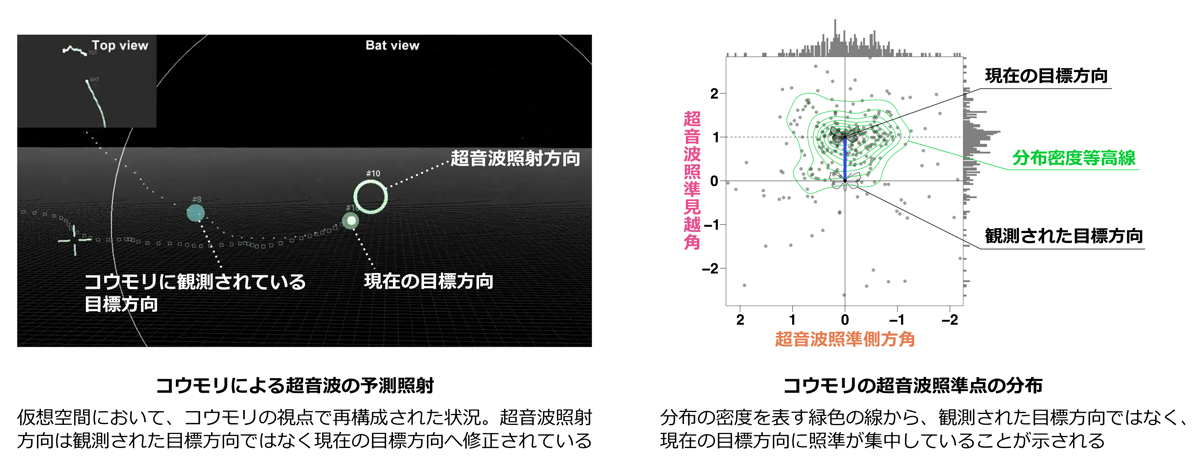
1) 感覚の遅延時間の分だけ目標の移動を予測して、移動先にスキャン方向(照準)を修正すること。
 2) スキャンのレート(一定時間に何回スキャンするか)を高速化すること。
2) スキャンのレート(一定時間に何回スキャンするか)を高速化すること。
※レートが早いほど、遅延が抑えられたり予測がしやすくなったりして、トラッキングの誤差が小さくなる。
3) スキャン範囲(視野の広さに相当)を拡大すること。
※たとえスキャンの向きが対象にぴったり合わなくても、そのズレをカバーできるくらいスキャン範囲が広ければ、トラッキングは継続できる。
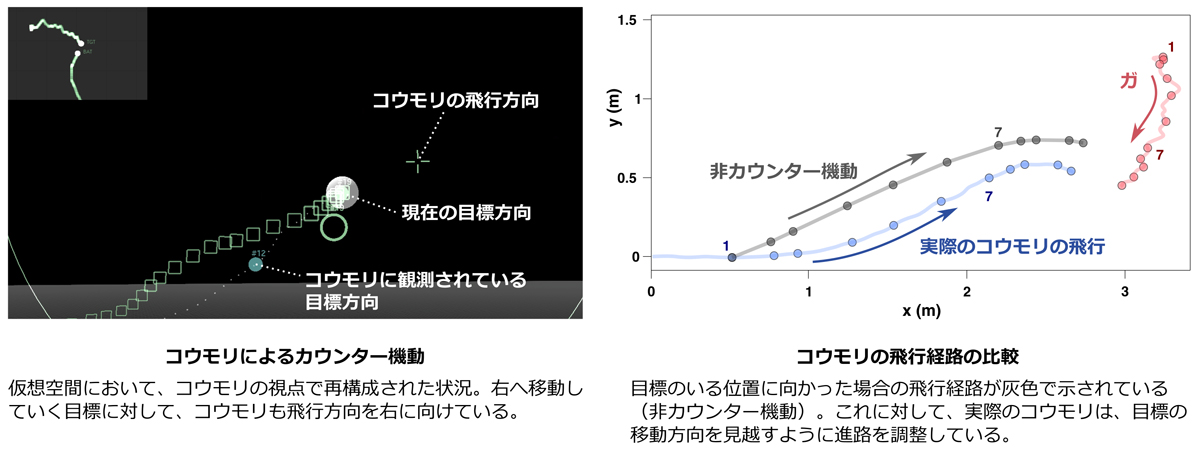
4) 目標との角度変化を相殺するように飛行し、目標方向を安定させること。
※「目標が右に移動したら、自らも右に移動する」というように、自らの動きによって相対的に目標の方向が変化しない状況をつくれれば、トラッキングの誤差をそもそも生じにくくさせられる。相対運動を相殺している好例として、短距離走を撮影するときにしばしば用いられるカメラドリーが挙げられる。
 コウモリの用いる戦術はいかに有効か?
コウモリの用いる戦術はいかに有効か?
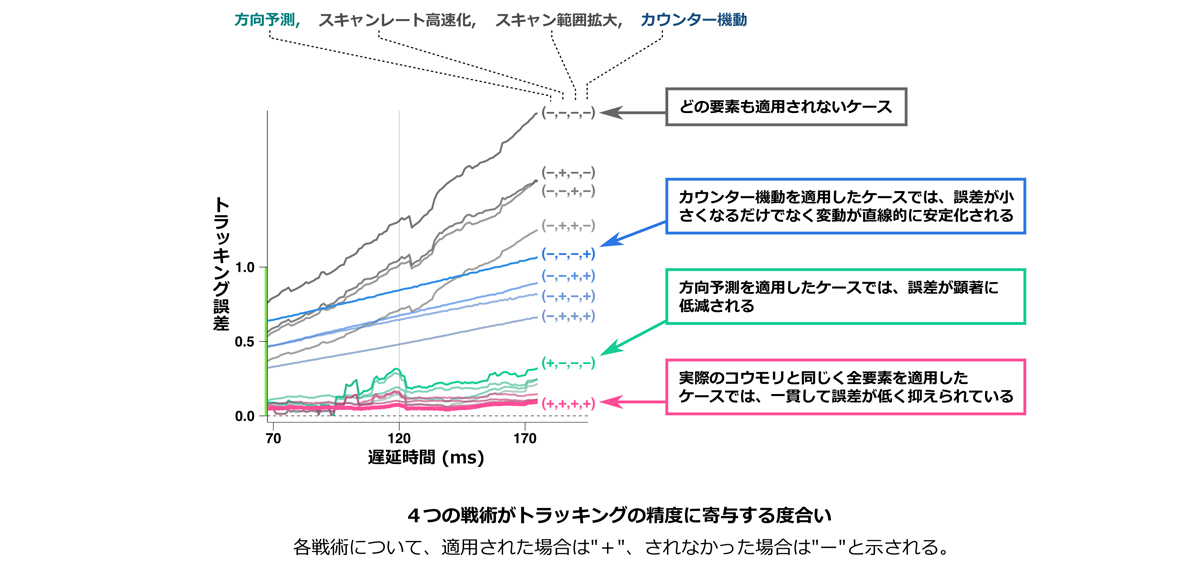
コンピュータシミュレーションによって各戦術がどの程度トラッキング精度に寄与しているのか調べたところ、下図のように各々が独立してトラッキング精度を向上させていることが確認できました。そしてコウモリはそれらを調和させ、幅広い感覚遅延の下でも安定して高いトラッキング精度を発揮していることが判明しました。複数の戦術を同時に用いるということは、たとえどれかが欠けても他の戦術がある程度機能を補ってくれることを意味します。このようなロバストな戦術の運用の仕方は、敵対的な状況、すなわち相手が捕食者のトラッキング戦略を崩そうとしてくる際に、特に有効と考えられます。
 コウモリはどのようにして複数の戦術を運用できているのか?
コウモリはどのようにして複数の戦術を運用できているのか?
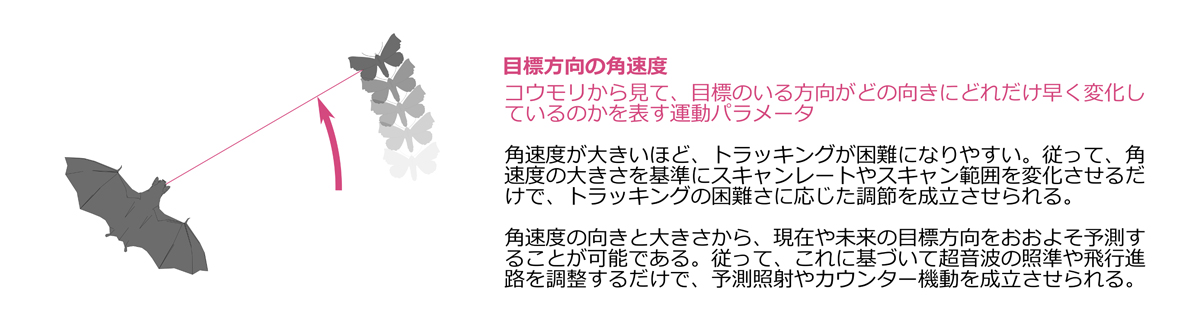
こうした有効性の一方で、複数戦術の同時展開は個体にマルチタスクを課すため、実際に運用するには相当の困難さがあると考えられます。これをコウモリがどのように克服しているのかを分析した結果、各戦術はどれも「目標方向の角速度」という単一の運動パラメータへの反応に集約できることが明らかになりました(下図)。このパラメータはコウモリからみた目標方向の時間変動を表すものであり、トラッキングしにくさの指標となる上に、現在の目標の方向を予測することにも使えます。したがって、このパラメータひとつから、トラッキング対処の重要度を見積もり、かつ目標方向の予測を行うことで、全ての戦術を制御することが理論上可能となります。そして、実際のコウモリにおいて、全ての戦術の調節度合いはこのパラメータと相関していることが確認されました。こうしたことから、一見マルチタスクを負っているようで、実はコウモリはタスクをうまくまとめあげ、負荷を低減していることが示唆されたことになります。
 まとめ
まとめ
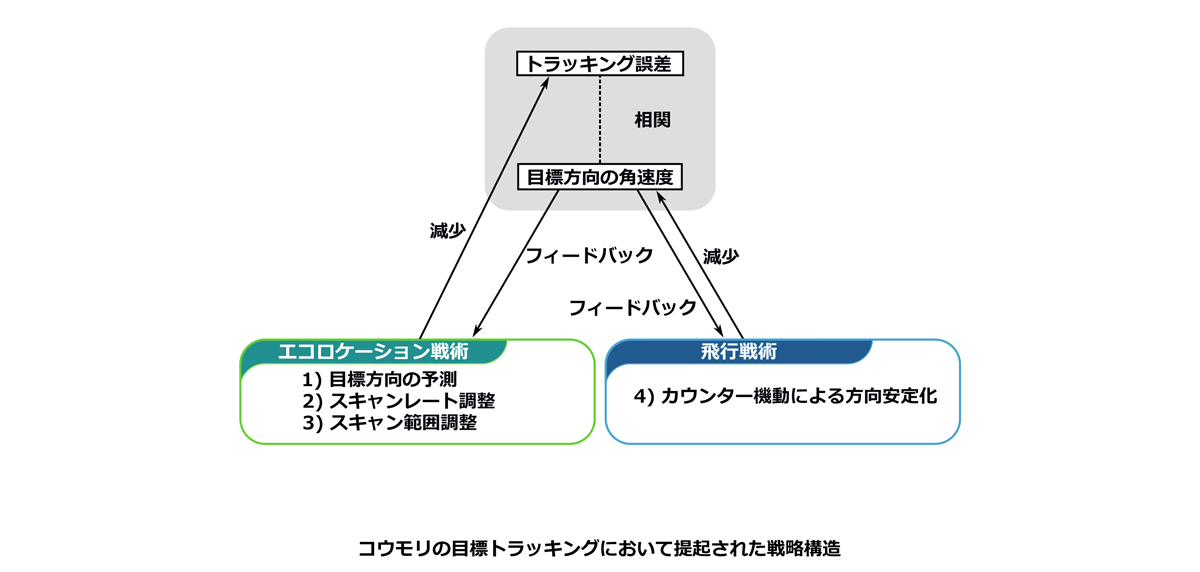
以上の結果から、コウモリにおける目標トラッキングの戦略構造が提起されました(下図)。まず、目標のいる方向の変動が激しいほど、トラッキング誤差が生じやすいという基本構図があります。これに対して、上記1)〜3)の超音波制御の戦術は、トラッキング誤差そのものに対抗するように機能し、4)の飛行制御の戦術はトラッキング誤差の原因となる目標方向の変動に対抗するように機能します。そして、すべての戦術の調節は、目標方向の角速度に応じてなされるというものです。こうした戦術の機能的分業と単一パラメータによる統合的制御によって、コウモリは感覚の遅延の問題にうまく対処し、優れたハンターとしての地位を確立しているのではないかと考えられます。
 【今後の展望】
【今後の展望】
動物の目標トラッキング能力については、これまでいくつかの動物種を対象に調べられてきました。しかし、ほとんどの研究は個別の戦術要素に絞って取り組まれていて、各戦術を統べる戦略的構造にまでは理解が進んでいませんでした。こうしたなか、本研究が一段広い視野で目標トラッキングの戦略構造に踏み込んだことで、動物のトラッキング能力の研究がいよいよ包括的に進められていくことが予想されます。
今回着目したトラッキング時の感覚遅延の問題は、コウモリに限らず様々な動物、そしてセンシング機器にも通ずるものです。そのため、本研究成果は、動物におけるセンシング能力の進化の理解に示唆を与えることに加え、センシング機器に対しても工学的な示唆を与えることになると期待されます。
今後は戦略の制御メカニズムの詳細な探究と、戦略の理論化が重要になってくると考えられます。戦略の制御メカニズムに関しては、今回の研究で各戦術の調整が単一運動パラメータで説明可能であることは示されましたが、これで制御メカニズムの実態が明らかになったというわけではありません。これを明らかにするためには、行動観察だけでは限界があり、神経学的なアプローチが不可欠です。他方、戦略の理論化に関しては、このコウモリと蛾という個別の構図を超えて行動ルールを数理的に導き出し、例えばドローンの目標トラッキングの制御などに応用できるようにしていくことなどが挙げられます。その際は、コウモリだけでなく他の動物の戦略を探ることも重要といえます。こうした多方面での研究努力を結集することで、目標トラッキングやマルチタスク対処における戦略の本質を明らかにしていけると考えられます。そこで得られた知見は広く生物学的にも工学的にも重要なものになると期待されます。
【研究者コメント】
持てる戦力を小出しにせず重要な局面に集中して投入することは、戦いの基本的なセオリーとして古くから言い伝えられています。しかし、これは簡単に実行できるものではありません。性質の異なる戦力をどう調和させるか、運用時の負荷をどう軽減するか、といった課題がつきまとうからです。こういったことは程度の差はあれきっと日常のそこかしこで多くの人が直面するものと思います。これらの課題を克服し、目標トラッキングという重要な局面で見事に複数の戦術を運用しているコウモリは、この古来からの戦(いくさ)の理をまさに体現しているといえます。私はそこに本種の戦略設計の巧みさを感じました。戦略理論の発展の裏に人類の戦いの歴史があったように、コウモリにおいても獲物との熾烈な共進化の歴史があったことでしょう。夕暮れ時、公園などでよく見かけるコウモリを、優れた戦略システムの表れとして、これまでとは違った気持ちで眺めることができるようになったと思います。
【発表雑誌】
雑誌名: Current Biology
掲載日: 2024年6月25日
論文タイトル: Bats integrate multiple echolocation and flight tactics to track prey
著者:Nozomi Nishiumi, Emyo Fujioka, Shizuko Hiryu
DOI: https://doi.org/10.1016/j.cub.2024.05.062
【研究グループ】
本研究は、西海望博士(基礎生物学研究所 神経行動学研究部門 研究員)と藤岡慧明博士(同志社大学 研究開発推進機構 特任研究員准教授)、飛龍志津子博士(同志社大学 生命医科学部 医情報学科 教授)との共同研究として行われました。
【研究サポート】
本研究は、文部科学省および日本学術振興会の科学研究費助成事業(16H06542,18H03786,18K14772,19H04940,21H05295,21K15169,22J40020)のサポートを受けて実施されました。
【本研究に関するお問い合わせ先】
基礎生物学研究所 神経行動学研究部門
研究員: 西海 望 (ニシウミ ノゾミ)
【報道担当】
基礎生物学研究所 広報室
同志社大学 広報部 広報課
