2019-08-27 岡山大学,日本医療研究開発機構
発表のポイント
- 岡山大学において医工連携でがんの診断および治療に用いる医療用針穿刺ロボット(Zerobot®)を開発しました。
- ロボットを用いて初めての臨床試験(First-in-human試験)を実施し、その有効性や安全性を確認したところ、実施した10例全てにおいて、ロボットによる針穿刺は成功し、不具合や重篤な有害事象もみられませんでした。
- CTガイド下IVRにおいて、術者への放射線被曝が問題となっていましたが、遠隔操作で針を穿刺できるロボットの開発により、術者への放射線被曝を防ぐことが期待されます。
概要
岡山大学大学院医歯薬学総合研究科の平木隆夫研究教授、大学院自然科学研究科の松野隆幸准教授、大学院ヘルスシステム統合科学研究科の亀川哲志講師らのグループは、2018年度に、岡山大学で開発したCTガイド下針穿刺ロボット(Zerobot®)を用いた人に対する初めての臨床試験(First-in-human試験)を実施しました。ロボットを用いた病理検査のための針穿刺の実施は、国内では初めてとなります。
2018年6月~10月にかけて、腎臓、肺、縦隔、副腎、筋肉に腫瘍がある10例の患者に対して、事前に臨床試験について担当医から詳細な説明を行った後、ロボットを用いたCTガイド下穿刺を行いました。ロボットによる腫瘍への針穿刺は10例全例で成功しました。またロボットの不具合や重篤な有害事象はみられず、術中の医師へのCTによるX線被曝はありませんでした。
外科手術においては、内視鏡手術用ロボットがすでに国内で導入されていますが、針穿刺を行うロボットは国内でも例がありません。
本ロボット開発は、2012年より岡山大学が医工連携で行っているものです。臨床試験で使用したロボットは、2014~2016年度 厚生労働科学研究委託費(医療機器開発推進研究事業)(2015年度から日本医療研究開発機構へ移管)において開発したものです。また、試験は日本学術振興会科学研究費助成事業基盤研究(C)において実施しました。
本研究成果は、8月23日、ヨーロッパの科学雑誌「European Radiology」に掲載されました。
発表内容
研究の背景
医師が、CTを撮影操作しながら腫瘍に針を穿刺して行う検査や治療のことをCTガイド下IVR(日本語名:画像下治療)と言います(図1)。針を刺すだけで行うことができますので、手技は短時間で終わり、患者の体への負担が小さく、超高齢化社会におけるがん医療として需要が高まっています。しかし、CT装置の近くで手技を行う医師は、CT撮影の際に出る放射線により被曝してしまうという欠点があります。そこで我々は、放射線の届かないCT装置から離れた場所から、遠隔操作で針を穿刺できるロボット(図2)を開発してきました。
の初めての臨床試験を実施!10例全例で成功!")
図1.CTガイド下IVR中の様子
術者はCT装置の近くに立ち、CT画像を確認しながら穿刺している。
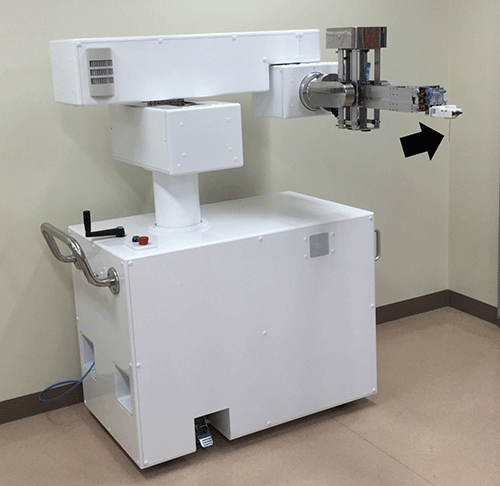
図2.岡山大学で開発したロボット
ロボットを遠隔操作してロボットアーム先端に取り付けた針(矢印)を穿刺する。
研究の目的
本研究の目的は、開発したロボットで初めての臨床試験(First-in-Human試験)を実施し、ロボットを用いた針の穿刺が有効かつ安全に行うことができるのか、また術者への被曝を本当に防ぐことが出来るのかを確認することです。
研究成果の内容
2018年6月~10月にかけて、腎臓、肺、縦隔、副腎、筋肉に腫瘍がある10例の患者に対して、ロボットを用いてCTガイド下に針の穿刺を行い(図3)、腫瘍の病理検査を行いました。ロボットによる腫瘍への針穿刺は10例全例で成功し、ロボットの不具合や重篤な有害事象はみられませんでした。また、術中の医師への放射線被曝線量を測定しましたが、検出されませんでした。 内視鏡手術用のロボットは既に国内で導入されていますが、針の穿刺を行うロボットは国内では例がありません。
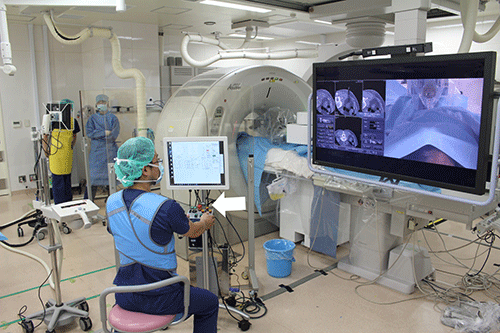
図3.臨床試験中の様子
医師はCT装置から離れた場所でコントローラ(矢印)を用いてロボットを遠隔操作している。
社会的な意義
ロボットを用いることで、医師は被曝することなく、手ブレのない高精度な針の穿刺が可能となります。また、手技の自動化も可能であり、それにより手技時間の短縮、患者被曝の低減、更には経験の少ない医師でも簡単に手技を行うことが期待できます。その他にも、遠隔医療への応用も考えられ、実現すれば、医師の少ない僻地においても最先端のがんに対する低侵襲医療が可能となります。また、ロボットの普及により、安価に行えて患者の体に負担の少ないIVRが更に普及すれば、患者の生活の質(QOL)の向上や医療費の削減も見込まれます。
今後の予定
2019年から日本医療研究開発機構(AMED)の「革新的がん医療実用化研究事業」において採択され、引き続き研究開発を実施しています。本研究開発では、3年間の事業期間内において薬事承認申請(製品化)に向けた治験を実施する予定となっており、現在治験に向けた様々な準備を行っています。
論文情報
- 論文名:
- Robotic Needle Insertion during Computed Tomography Fluoroscopy-guided Biopsy: Prospective First-in-Human Feasibility Trial
- 掲載紙:
- European Radiology
- 著者:
- Hiraki T, Kamegawa T, Matsuno T, Sakurai J, Komaki T, Yamaguchi T, Tomita K, Uka M, Matsui Y, Iguchi T, Gobara H, Kanazawa S.
- DOI:
- 10.1007/s00330-019-06409-z
- URL:
- https://doi.org/10.1007/s00330-019-06409-z
研究資金
本研究で使用したロボットは、2014~2016年度 厚生労働科学研究委託費(医療機器開発推進研究事業)(2015年度から日本医療研究開発機構へ移管)の支援を受けて開発しました。(医療機器開発推進研究事業 課題名:CT透視下針穿刺用医療ロボットの開発 ―ロボティックIVRの時代へ ―(課題管理番号:16hk0102014h0003)
また、本研究は、日本学術振興会科学研究費助成事業の支援を受けて実施しました。(基盤研究(C) 課題名:遠隔操作型針穿刺ロボットを用いたCT透視ガイド下生検の臨床試験(FIH試験) (課題番号:18K07677))
お問い合わせ
岡山大学 大学院医歯薬学総合研究科
研究教授 平木隆夫
AMED事業に関するお問い合せ先
日本医療研究開発機構(AMED)
産学連携部医療機器研究課

