
「今使っている装具がロボットに変わる」新しい発想のリハビリ支援ロボット
2019-12-12 京都大学
大畑光司 医学研究科講師、川崎詩歩未 同博士課程学生、坪山直生 佛教大学教授、澤田祐一 京都工芸繊維大学教授、東善之 同助教らの研究グループは、COI拠点において歩行学習支援ロボット「Orthobot」(オルソボット)を開発しました。
Orthobotは、歩行に何らかの障害を抱える人々の歩行リハビリテーションを補助する装着型アシストロボットです。従来のリハビリテーションロボットは装着に時間がかかり、専門家による設定が必要であるなど、専門家のいない介護現場では利用が困難でした。
本機器はモーターとセンサーを内蔵した本体ユニットを、使用者が歩行リハビリテーションにおいてKAFO(長下肢装具)に取り付けるだけで、装着者の歩行を本来あるべき歩行運動に誘導することができます。本機器を使用することにより、歩行が不安定になった方に対して、簡便に正常な歩行を体験させることが可能になります。
本機器は製品化され、2020年3月に発売を予定しています。

図:(左)Orthobot本体ユニットと腰ベルトユニット。(右)本機器をKAFOに装着した様子。
詳しい研究内容について
歩行学習支援ロボット「Orthobot」を開発
―「今使っている装具がロボットに変わる」新しい発想のリハビリ支援ロボット―
概要
京都大学大学院医学研究科 大畑光司 講師、川崎詩歩未 同博士課程学生、佛教大学保険医療技術学部 坪山 直生 教授、京都工芸繊維大学機械工学系 澤田祐一 教授、東善之 同助教らの研究グループは、京都大学 COI (Center of Innovation)において歩行学習支援ロボット「Orthobot」(オルソボット)を開発しました。
Orthobot は、歩行に何らかの障害を抱える人々の歩行リハビリテーションを補助する装着型アシストロボ ットです。従来のリハビリテーションロボットは装着に時間がかかり、専門家による設定が必要であるなど、 専門家のいない介護現場では利用が困難でした。本機器はモーターとセンサーを内蔵した本体ユニットを、使 用者が歩行リハビリテーションにおいて KAFO (長下肢装具)に取り付けるだけで、装着者の歩行を本来ある べき歩行運動に誘導することができます。本機器を使用することにより、歩行が不安定になった方に対して、 簡便に正常な歩行を体験させることが可能になります。
本機器は製品化され、2020 年 3 月に発売を予定しています。

(左)「Orthobot」本体ユニットと腰ベルトユニット
(右)本機器を KAFO(長下肢装具)に装着した様子
1.背景
現在の日本において、脳卒中の患者数は 130 万人に上ると言われており、後遺症や脊髄損傷等により、歩行 に何らかの障害を抱える方々が数多くいらっしゃいます。これらの方々は、歩行トレーニングを行なって歩行 機能の改善を図る必要がありますが、介護施設やデイケアなどで効果的なトレーニングを提供するのは、なか なか難しいとされています。また、歩行機能の低下は、易疲労性や転倒リスクの増加、活動量の低下、廃用症 候群を引き起こすリスクを高め、最終的には訓練もままならなくなって重症化してしまうという問題がありま す。
歩行学習支援ロボット 「Orthobot」は、その人の歩行に応じたタイミングでモーターが膝を動かすことで正 しい歩き方を体験することができるように開発されました。これにより、より簡便に日常生活の一部として正 しい歩行の学習を支援し、これらの課題を解決することを目指します。
2.研究手法・成果
本機器は、京都大学医学研究科人間健康科学系専攻の脳卒中リハビリテーションやリハビリテーションロボ ットについての医学的知見を踏まえた着想をもとに、京都工芸繊維大学で制御アルゴリズムが構築され、サン コール株式会社と大日本印刷株式会社が中心となって機器を開発し、機器の評価は京都大学、佛教大学および 関西医科大学で行いました。
■ 本機器の役割について
リハビリテーションのロボット化は高齢社会の進んだ我が国における健康寿命の延伸を目指す上で必要な 取り組みです。しかし、従来のリハビリテーションロボットは装着に時間がかかり、専門家による設定が必要 なことなどのため、特に専門家のいない介護現場で簡便に用いることが難しい状況です。本機器は高齢者を含 めた歩行が不安定になった方に対して、より簡便に正常な歩行を体験させるための補助を行う機器として開発 されました。
■ 本機器の技術的な特徴について
本機器のアシスト制御は、歩行中の適切なタイミングで膝関節へのアシストトルクをモーターによって加え るように設計されています。制御システムは機器使用者の大腿部(Orthobot 本体ユニット)に搭載された大 腿姿勢を計測する姿勢角センサー、大腿部の姿勢角から歩行状態を推定しアシストのタイミングを決定する位 相角生成器、アシストトルクの出力パターンを決定するトルクテーブルから構成され、姿勢角センサーから得 られる大腿部の動きに関する情報のみに基づいて、どのような歩幅、歩行速度での歩行においても、最適なト ルクタイミングでのアシストを可能としました。
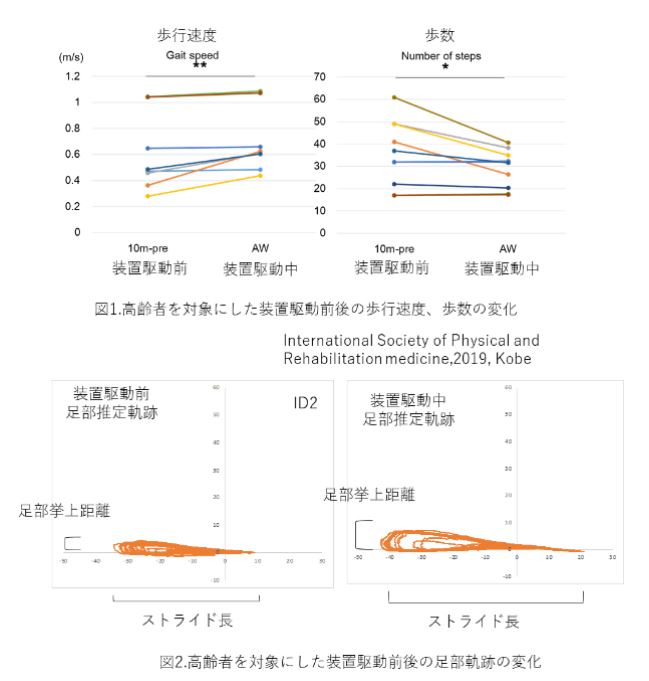
本機器を使用することによって、装置駆動前に比べて歩行速度が上がり、10m歩行での歩数が減る、すなわ ち歩幅が広くなるという結果が得られました(図1)。また、足部軌跡の観察からも装置駆動前に比べて、足 が上に挙がり、歩幅(ストライド長)が大きくなるという結果が得られました(図2)。
■ 製品ついて
京都大学 COI のこれまでの成果をもとに、サンコール株式会社と大日本印刷が中心となって製品化をおこな い、2019 年度内にフィンガルリンク株式会社を通じて販売を開始する予定です。
本機器は、駆動用モーターの内蔵された Orthobot 本体ユニット、充電池と操作パネルが搭載された腰ベル トユニットで構成されていて、 一般的に脳卒中後の歩行リハビリで使用する KAFO(長下肢装具)に本機器 をアドオンすることで、KAFO が最新のリハビリ用ロボットに変化します。
駆動部や制御部の最適化により、Orthobot 本体ユニットは約 1.2 キログラム、腰ベルトユニットは約 1.8 キ ログラムと軽量に仕上がっています。腰ベルトユニットは介助者が持つことも可能で、装着者への負担を最小 限に抑えました。
アシスト設定は、3 つのプリセットモード(標準・引掛り防止・歩幅アップ)から、目的のモードを選ぶだ けで使用することができます。また、カスタムモードを使用することにより、より高度な設定も可能です。
3.波及効果、今後の予定
日常生活活動に障害を抱える人々に対するリハビリテーションロボットは 「human-Robot collaboration (人 とロボットの共同作業)」の象徴となっています。本機器の社会実装を通じて、自立支援 ・社会参加を促進し、 京都大学 COI のテーマである安心安全な 「しなやかほっこり社会」を実現していきます。また、今後は特定臨 床研究を実施し、本機器の効果検証を一層高め、より高度な医療向け機器の開発を行っていきます。
4.研究プロジェクトについて
本研究は、以下の予算の支援を受けて行われました。
革新的イノベーション創出プログラム(COI STREAM)拠点
(国立研究開発法人科学技術振興機構:JST)
「活力ある生涯のための Last 5X イノベーション」
(プロジェクトリーダー:野村 剛 パナソニック株式会社 客員)
研究課題名:「歩行学習支援ロボット」
研 究 者:大畑 光司(京都大学 京都大学医学研究科 講師)
研 究 期 間:平成 25 年度~平成 33 年度
<研究者のコメント>
我々は普段、意識せずに歩行を行なっているために、歩き方の癖を自ら認識するのは非常に難しい課題です。 特に高齢者は加齢に伴い歩き方が変化する場合がありますが、それに対して、どのように歩けば良いのかにつ いて口頭で説明して理解を得ることは非常に困難です。本機器は正しい歩き方についての感覚的な体験を得る ことを通して、歩行運動の理解を深めることができます。
<関連論文・学会発表>
<論文>
タイトル:Development of new rehabilitation robot device that can be attached to the conventional Knee-Ankle-Foot-Orthosis for controlling the knee in individuals after stroke.
著 者:Shihomi Kawasaki, Koji Ohata, Tadao Tsuboyama, Yuichi Sawada, Yoshiyuki Higashi,
掲 載 誌:IEEE Int Conf Rehabil Robot. 2017 Jul;2017:304-307.
D O I:10.1109/ICORR.2017.8009264
<学会発表>
タイトル:Immediate Change and Aftereffect of Gait Performance in Elderly People by Robot-Knee-Ankle-Foot-Orthosis (Orthobot)
発 表 者:Shihomi Kawasaki, Koji Ohata, Yuichi Sawada, Yoshiyuki Higashi, Nodoka Kimura, Satomi Watanabe, Akihiro Tsuruda, Shiori Nogi, Tadao Tsuboyama
発表学会 :13 th International Society of Physical and rehabikitation medicine world congress June 9-13,2019

