
歩くと走るはどの程度違うのか
2019-01-24 京都大学
青井伸也 工学研究科講師、Yury Ivanenko IRCCSサンタルチア財団博士らの研究グループは、東京大学、電気通信大学と共同で、人が歩き、走るための脳神経の制御様式を、脳神経・筋・骨格系の数理モデルを用いた研究により、数理的に明らかにしました。
人の身体には多数の筋肉や関節があり、脳神経がこの複雑な構造を上手く制御することで、歩いたり、走ったり、様々な運動を可能にしています。その際、脳神経は多数の筋肉をそれぞれ個別に制御するのではなく、運動に応じた筋の組合せと活動パターンを複数用意しておき、それらを介して制御することで、制御の構造をシンプルにし、制御の負荷を減らしているという「筋シナジー」と呼ばれる考え方が提唱されています。
本研究グループは、この筋シナジーに基づく脳神経の制御モデルと筋・骨格モデルを統合した動力学シミュレーションを行いました。その結果、共通の制御様式を用い、少数のパラメータを変えるだけで歩くことも走ることもできることを数理的に明らかにしました。
本研究成果は、未だ議論のある筋シナジーの存在に重要な示唆を与え、運動能力やコーチングの向上などスポーツ科学の発展や、外骨格ロボットの制御など運動支援技術の発展に寄与することが期待されます。
本研究成果は、2019年1月23日に、国際学術誌「Scientific Reports」のオンライン版に掲載されました。

図:本研究のイメージ図
書誌情報
【DOI】https://doi.org/10.1038/s41598-018-37460-3
【KURENAIアクセスURL】http://hdl.handle.net/2433/236094
Shinya Aoi, Tomohiro Ohashi, Ryoko Bamba, Soichiro Fujiki, Daiki Tamura, Tetsuro Funato, Kei Senda, Yury Ivanenko & Kazuo Tsuchiya (2019). Neuromusculoskeletal model that walks and runs across a speed range with a few motor control parameter changes based on the muscle synergy hypothesis. Scientific Reports, 9:369.
詳しい研究内容について
―脳神経による⼈間の歩⾏と走⾏の制御様式を数理モデルで解明―概要
京都大学大学院工学研究科 青井伸也 講師や IRCCS サンタルチア財団・神経運動生理学研究室 Yury Ivanenko 博士らの研究グループは、東京大学、電気通信大学の研究グループと共同で、人が歩き、走るため の脳神経の制御様式を、脳神経・筋・骨格系の数理モデルを用いた研究より数理的に明らかにしました。
人の身体には多数の筋肉や関節があり、脳神経がこの複雑な構造を上手く制御することで、歩いたり、走っ たり、様々な運動を可能にしています。その際、脳神経は多数の筋肉をそれぞれ個別に制御するのではなく、 運動に応じた筋の組合せと活動パターンを複数用意しておき、それらを介して制御することで、制御の構造を シンプルにし、制御の負荷を減らしているという「筋シナジー」と呼ばれる考え方が提唱されています。
本研究グループは、この筋シナジーに基づく脳神経の制御モデルと筋 ・骨格モデルを統合した動力学シミュ レーションを行いました。その結果、共通の制御様式を用い、少数のパラメータを変えるだけで歩くことも走 ることもできることを数理的に明らかにしました。この結果は、未だ議論のある筋シナジーの存在に重要な示 唆を与え、運動能力やコーチングの向上などスポーツ科学の発展や、外骨格ロボットの制御など運動支援技術 の発展に寄与すると期待されます。
本成果は、2019 年 1 月 23 日に英国の国際学術誌「Scientific Reports」にオンライン掲載されました。
 1.背景
1.背景人の身体には、多数の筋肉 約 400 個)と関節 約 300 個)があり、脳神経がこの複雑な構造を上手く制御 することで、歩いたり、走ったり、様々な運動を可能にしています。人は速度に応じて 「歩く 歩行)」と 「走 る 走行)」を使い分けますが、歩くときには、身体を支える脚は膝をあまり曲げず、接地点を中心として回 転する倒立振子のように振る舞います。その一方で走るときには、膝をむしろ曲げてバネのように使い、全身 で飛び上がります。このように、歩くと走るでは運動の様子は大きく異なります。身体の複雑さやこのような 運動の違いを考えると、歩いたり走ったりするための脳神経の制御はとても複雑で、歩く場合と走る場合でと ても違っているのでは?と想像してしまいます。
脳神経が多数の筋肉や関節を適切に制御する仕組みはまだよくわかっていません。しかし、膨大な数の筋肉 や関節を個別に制御しているとはなかなか考えられません。そこで、様々な運動において筋活動を計測して調 べてみると、運動に依存して、同じタイミングで活動する筋の組合せが存在することが見えてきます。図 1 は これを模式的に示したもので、3 つの活動パターンとそれらに対応する筋の組合せが示されています。この筋 の組合せは、多数の筋 筋 1~筋 n)がそれぞれどのような比率で活動しているのかを示しており、対応する 活動パターンと掛け合わせ、3 つの活動パターンと筋の組合せを掛け合わせたものを足し合わせることで、そ れぞれの筋活動を説明できるというものです。すなわち、計測した筋活動が複雑に見えても、実は 3 つの筋の 組合せと活動パターンで説明できるというわけです。このような観測に基づいて、「筋シナジー」という考え 方が提唱されています。これは、膨大な数の筋肉をそれぞれ個別に制御するのではなく、運動に応じた筋の組 合せと活動パターン 筋シナジー)を複数用意しておき、その筋シナジーを介して制御することで、制御の構 造をシンプルにし、負荷を減らすことができるという考え方です。
この筋シナジーの考え方に沿って、歩いているときと走っているときの筋活動をそれぞれ計測して調べると、 どちらも 5 つの筋の組合せと活動パターンで 1 周期中のほとんどの筋活動を説明できることが知られていま す。しかも、この筋の組合せと活動パターンには歩くときと走るときで共通するものが多く見られています。 このような結果から、歩いたり走ったりするための脳神経の制御は実はとてもシンプルで、歩く場合と走る場 合で共通する部分も多く、ほんの少数の要素で制御様式の違いを説明できるのではないか?と予想されます。 しかし、歩くという運動も走るという運動も、脳神経と筋・骨格 関節)、そして環境との相互作用から形成 される複雑な力学現象であり、その一部を計測した筋活動からその全体像を明らかにするには限界がありまし た。
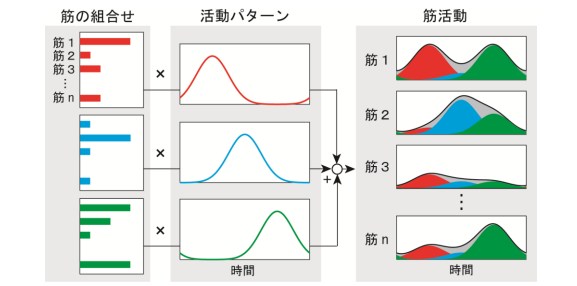
図 1.筋の組合せと活動パターン 筋シナジー)で説明される筋活動 図は 3 つの組合せと活動パターンの例)
2.研究手法・成果
本研究では、歩行も走行も脳神経と筋・骨格 関節)、そして環境との力学的な相互作用から形成されると いう文脈に沿うように、脳神経、筋・骨格、環境それぞれの数理モデル 図 2)を構築してそれらを統合し、 動力学シミュレーションを通して、歩行と走行を実現する脳神経における制御様式を調べました。具体的には、 筋シナジーの考え方に基づいて、5 つの筋の組合せと活動パターンを用いて、69 個のパラメータを持つ脳神経 の制御モデルを構築しました。そして、頭と腕を含めた体幹 1 リンクと 頭と腕は体幹に対して動かない)、 左右の脚の大腿、下腿、足の 6 リンクからなる骨格、片脚に歩行と走行に主要な 9 つの筋肉を用いた筋 ・骨格 の数理モデルを構築しました。環境としては、地面との相互作用と重力をモデル化しています。
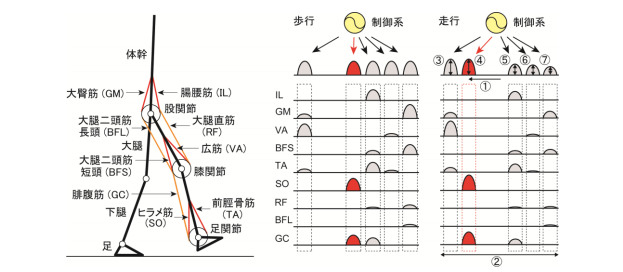
図 2.筋・骨格モデル(左)と脳神経の制御モデル(右):①~⑦は歩行と走行で変化させたパラメータ
これらの数理モデルを統合したシミュレーションの結果、69 個ある制御パラメータのうち、次の 7 個を変 化させるだけで (図 2 の①~⑦)、歩行も走行も実現できることがわかりました 図 3):
①.2 番目の活動パターンのタイミング
②.周期
③~⑦.5 つの活動パターンの振幅
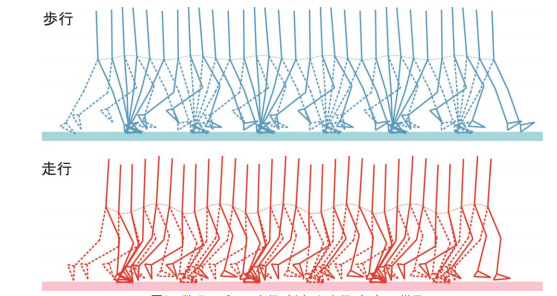
図3.数理モデルの歩行 (上)と走行 (下)の様子
すなわち、5 つの筋の組合せや、2 番目の活動パターン以外の 4 つの活動パターンのタイミングは全く変えず、 少数の性質を変えただけで、歩行と走行という振る舞いの大きく違う運動が実現されたわけです。更に、同じ 7 つの制御パラメータを変えるだけで、歩行と走行の両方で、一定の範囲ながら速度を変化できることもわか りました。
筋シナジーは、サルを用いた実験などからその神経基盤が明らかになりつつありますが、その存在には未だ 議論があります。本研究の数理モデルを用いた研究から明らかにされた知見は、数理というこれまでとはまた 異なる視点から、筋シナジーの存在に重要な示唆を与えます。
3.波及効果、今後の予定
歩行 ・走行における制御様式が理解されれば、運動能力やコーチングの向上などスポーツ科学の発展に寄与 することが期待されます。また、筋シナジーの考え方は、歩行・走行に限らず様々な運動に当てはまります。 本研究で構築した脳神経 ・筋 ・骨格系の数理モデルは、人の優れた運動知能を理解する上で、有効なツールと なると期待されます。また、脳卒中など筋肉や関節の協調性を損なう疾患も数多く存在し、筋シナジーに基づ く治療やリハビリテーション法の開発など様々な医療応用も期待されます。更には、多数の関節を持つロボッ トや運動支援の外骨格ロボットの制御など、工学的にも様々な応用に発展すると期待されます。
4.研究プロジェクトについて
本研究は、主に科学研究費補助金 基盤研究 B) 特設分野研究 :連携探索型数理科学)「シナジーとリズム に基づく歩行の数理」 課題番号 15KT0015)、および新学術領域研究 ・身体性システム 「脳内身体表現を変容 させる運動制御モデル」 課題番号 26120006)の支援を受けました。
<研究者のコメント>
歩行や走行に限らず、人の運動は脳神経と筋・骨格、そ して環境を介した相互作用を通して形成される複雑な力学 現象です。その力学・制御原理を真に理解するためには単 独の研究分野に留まった研究では限界があります。この研 究では、京都大学大学院工学研究科の青井伸也を中心とし た数理モデルに基づく工学的研究と、IRCCS サンタルチア 財団神経運動生理学研究室の Yury Ivanenko を中心とした 神経生理学的研究の共同研究の結果として実を結びまし た。今後も学際的な研究を展開し、人の優れた運動知能の 解明や様々な応用に向けた研究を展開していきたいと思い ます。
<論文タイトルと著者>
タイトル:Neuromusculoskeletal model that walks and runs across a speed range with a few motor control parameter changes based on the muscle synergy hypothesis 筋シナジー仮説に基づく神経 ・筋 ・ 骨格モデルを用いて,少数の制御パラメータを変えるだけで,一定の速度域を歩行・走行できるこ とを示した)
著 者:Shinya Aoi, Tomohiro Ohashi, Ryoko Bamba, Soichiro Fujiki, Daiki Tamura, Tetsuro Funato, Kei Senda, Yury Ivanenko, Kazuo Tsuchiya
掲 載 誌:Scientific Reports
DOI:10.1038/s41598-018-37460-3

