状況に応じた歩行パターンの使い分け
2019-07-10 京都大学
水元惟暁 農学研究科博士課程学生(現・アリゾナ州立大学・日本学術振興会海外特別研究員)、土畑重人 同助教の研究グループは、シロアリのオスとメスが異なる歩行パターンを状況に応じて使い分けることで、パートナーとの遭遇効率を上げていることを発見しました。
探しているものの居場所がわからないとき、動き方で遭遇確率が決まります。効率のよい動き方は状況に応じて変化するため、生物の探索効率を調べるには、その生物をとりまく状況を明確にする必要があります。
本研究ではシロアリの配偶者探索には2つの状況があることに着目し、行動を定量化することで、相手がどこにいるか全く分からないときには、オスもメスも活発に動いて探索する一方で、相手が少なくとも近くにいると分かっている場合には、オスが動き、メスがその場に留まることを発見しました。さらに、シミュレーションにより、観察された歩行パターンの切り替えが、実際に遭遇効率上昇に寄与していることを示しました。
本研究成果は、生物の探索行動における理論と実証とを結びつけた点で重要な価値を持つと考えられます。
本研究成果は、2019年6月20日に、国際学術誌「Science Advances」のオンライン版に掲載されました。

図:状況に応じたシロアリの歩行パターンの変化
書誌情報
【DOI】 https://doi.org/10.1126/sciadv.aau6108
【KURENAIアクセスURL】 http://hdl.handle.net/2433/242939
Nobuaki Mizumoto and Shigeto Dobata (2019). Adaptive switch to sexually dimorphic movements by partner-seeking termites. Science Advances, 5(6):eaau6108.
詳しい研究内容について
シロアリの配偶者探索における動き方の秘策を解明
―状況に応じた歩行パターンの使い分け―
概要
京都大学大学院農学研究科 水元惟暁 博士課程学生(研究当時、現:アリゾナ州立大学 日本学術振興会海 外特別研究員)、土畑重人 同助教の研究グループは、シロアリのオスとメスが異なる歩行パターンを状況に応 じて使い分けることで、パートナーとの遭遇効率を上げていることを発見しました。
探しているものの居場所がわからないとき、動き方で遭遇確率が決まります。効率のよい動き方は状況に応 じて変化するため、生物の探索効率を調べるには、その生物をとりまく状況を明確にする必要があります。
本研究ではシロアリの配偶者探索には 2 つの状況があることに着目し、行動を定量化することで、相手がど こにいるか全く分からないときには、オスもメスも活発に動いて探索する一方で、相手が少なくとも近くにい ると分かっている場合には、オスが動き、メスがその場に留まることを発見しました。さらに、シミュレーシ ョンにより、観察された歩行パターンの切り替えが、実際に遭遇効率上昇に寄与していることを示しました。
本研究成果は、生物の探索行動における理論と実証とを結びつけた点で重要な価値を持ちます。
本成果は、2019 年 6 月 20 日に、国際学術誌「Science Advances」にオンライン掲載されました。
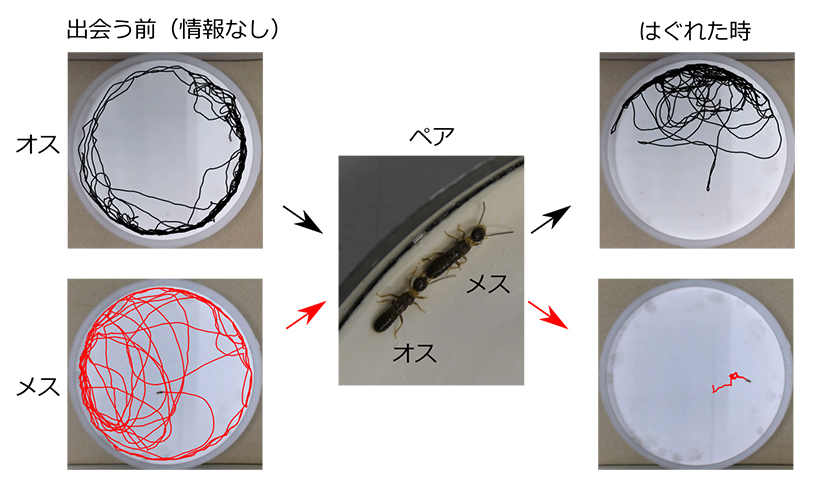
図:状況に応じたシロアリの歩行パターンの変化
1.背景
パートナーとして互いを求める配偶者探索において、オスとメスはどのように動けば効率よく相手と出会 うことができるでしょうか。探しているものがどこにいるか分からないときの探索((ランダム探索)において は、どのように動くかによって目的のものとの遭遇効率が決まります。これまでに多くの理論研究が、様々な 条件下での最適な動き方について予測を立ててきました(例:本研究グループの過去の研究;「京都大学研究 成果、 それぞれに異なる動きで効率的な出会い -あらゆる 1 対 1 の遭遇の最適化に応用可能-」を参照 http://www.kyoto-u.ac.jp/ja/research/research_results/2017/170510_1.html)。これらの研究から分かっ たことは、最適な動きのパターンは状況に応じて変わり、どのような状況でも効率が高くなる探索方法は存在 しないということです。そのため、実際の生物が効率よく探索行動をしているかどうかを調べるためには、そ れぞれの生物をとりまく状況を明らかにする必要があります。
本研究では、シロアリの配偶者探索に注目しました。シロアリは一夫一妻の繁殖様式を持ち、年に一度、 翅アリが巣から飛び出して分散した後、翅を落として歩いてパートナーを探索します。この際、シロアリは周 囲ついての情報はなく、また視覚やフェロモンも遠くの個体を認識できるほどには働きません。そして運よく 出会えたペアは、オスがメスの後ろについてタンデム歩行を行い、巣を作れる場所を探します。ここで説明し たシロアリのパートナー探索プロセスには、2 つの状況が存在します((1 ページの図)。1 つ目は、まだ出会う 前の状況で、この時にはパートナーがどこにいるかは全く分かりません。そしてもう 1 つは、タンデム歩行中 にはぐれてしまった場合です。この場合には、パートナーは少なくとも近くにいるはずですが、具体的にどこ にいるかはわかりません。そこで本研究では、この 2 つの状況の変化に応じて、シロアリがどのように探索行 動を変化させるかについて調べました。
2.研究手法・成果
実験室でシロアリをシャーレの上に置き、動画を撮影することで、歩行パターンを計測しました。まず、 オスとメスそれぞれ単独での歩行パターンを計測し、その後パートナーを導入することでタンデム歩行を促し ました。そして、タンデム歩行から、パートナーを取り除いてもう一度単独にすることで、最初の状態から、 どのように動きのパターンが変化するかを調べました(同図左)。
その結果、出会う前の最初の状況では、オスもメスも活発に動いて探索したため、歩行パターンの性差は 観測されませんでした。しかし、タンデム歩行後からはぐれた場合には、メスはその場に立ち止まり、オスは あたりを動いて隈なく探すという明確な雌雄差が観測されました(同図右)。
パートナーに出会う前の状況は、他個体との距離関係はランダムで、探索空間のどの方向にも配偶相手が 存在し得る状況だと考えられます。一方で、はぐれた際の状況は、必ず近くにはぐれたパートナーが存在する 状況です。そこで観測から得られたデータからシロアリの歩行パターンをモデル化し、この 2 つの状況での探 索効率についてシミュレーションを行い調べました。その結果、実際に各状況で見られた歩行パターンが、そ れぞれの状況において効率的であることが分かりました。つまり、シロアリは状況に応じて、雌雄で同じ動き のパターンと、異なる動きのパターンとを使い分けることによって、効率的に配偶者探索をおこなっていたの です。
3.波及効果、今後の予定
本研究で見られた現象は、社会性をもつ他の生物にもあてはまります。例えば、タンデム歩行は、いくつ かのアリでも、他の働きアリを新たな巣や餌場に動員する際に用いられることが知られています。興味深いこ とにアリのタンデム歩行でも、タンデムが分断されると、前をいく個体が立ち止まり、後ろについていた個体 が動き回ることが観測されています。アリのタンデム歩行とシロアリのタンデム歩行とでは、目的もその様式 も大きく異なりますが、遭遇効率の最適化と 2 個体の間で明確に異なる動きが生じる点で、行動の顕著な収斂 進化が起きていると考えられます。更に人間社会においても、似たような状況は存在します。例えば、ショッ ピングモールのような場所ではぐれた 2 人はどのように探索すれば効率がいいでしょうか。これはランデブー 探索問題と呼ばれており、この問題でも、片方がその場に留まり、もう片方が動くことが最適になる場合が発 見されています。
生物の探索行動については、これまで多くの理論研究が存在しましたが、そのほとんどは実際の生物で検 証されることのないままでした。本研究は、生物が実際に探索する状況を明確にし、それぞれの状況でどのよ うに動きのパターンを変化させるかについて調べることで、理論と実証との隙間を埋めることに成功しました。 このような実証研究は、今後の探索理論の実証研究のロールモデルとなる点で大変重要です。
4.研究プロジェクトについて
本研究は、JSPS 科研費 15J02767, 15K18609, 17H01249 の助成を受けたものです。
<研究者のコメント>
相手をいかに効率よく探せるか、誰しもが一度は考えたことがあるのではないでしょうか。探索行動の研究に あたっては、理論を実証することが最も重要かつ難しい課題です。シロアリの行動を対象とした今回の研究に よって、これまで私たちが行ってきた理論研究に対する実証的回答が出せたことを、嬉しく思っています。
<論文タイトルと著者>
タイトル:Adaptive(switch(to(sexually(dimorphic(movements(by(partner-seeking(termites (シロアリの配 偶者探索における適応的な動きのパターンの切り替え)
著 者:水元惟暁、土畑重人
掲 載 誌:Science(Advanves DOI:10.1126/sciadv.aau610

