
環境を荒らさずに野生動物を調査
2021-01-28 東京大学
○発表者:
沖 一雄(東京大学 生産技術研究所 特任教授/ 京都先端科学大学 工学部 教授)
牧 雅康(福島大学 農学群食農学類 准教授)
奥村 忠誠(株式会社 野生動物保護管理事務所 本社調査事業部 部長)
○発表のポイント:
◆尾瀬ヶ原に生息するシカについて、鳴き声から時空間分布を推定する手法と、夜間にドローンの熱赤外カメラを用いて全域にすむ個体数を把握する手法を開発しました。
◆本手法により、人が立ち入ることで起こる自然環境のかく乱を最小限に抑えつつ、シカの時空間分布と個体数を把握することが可能です。これにより、シカの個体数管理用の基礎データを提供できます。
◆さまざまな動物の鳴き声をデータベース化し、地域に生息する動物の時空間分布を特定すれば、生物多様性の保全への貢献も期待できます。
○発表概要:
東京大学 生産技術研究所の沖 一雄 特任教授(京都先端科学大学 工学部 教授)、京都先端科学大学 工学部 Salem Ibrahim Salem(サレム イブラヒム サレム) 講師、福島大学 農学群食農学類 牧 雅康 准教授、株式会社 野生動物保護管理事務所 本社調査事業部 奥村 忠誠 部長らは、(1)複数マイクロフォンによるシカ時空間分布解析手法の開発、および(2)ドローン(UAV:Unmanned Aerial Vehicle)による尾瀬ヶ原全域のシカ個体数推定把握のための観測手法の開発に成功しました。
ラムサール条約登録湿地に登録されている尾瀬ヶ原・尾瀬沼では、1990年代半ばからシカが確認されるようになり、自然植生が破壊され、生態系へ不可逆的な影響が生じることが懸念されてきました。被害を低減させるために、シカの捕獲事業や継続的な植生被害のモニタリング、防護手法の検討はなされてきましたが、シカの生息個体数が不明なため、必要な捕獲数を設定することはできていませんでした。
そこでシカの個体数を把握することを目的に、マイクロフォンで周辺の音を拾い、特徴的な鳴き声からシカの場所を評価する手法を開発しました。本手法は、従来の手法に比べ、保全対象地域に人が高頻度で入りこむことなく、少ない労力で、シカの時空間分布を精度高く継続的に推定できるという点で独創的であり、世界初のシステムといえます。さらに、熱赤外センサを搭載した複数のドローンで上空から湿原内全域の観測をすることで、夜間に森林から湿原内に出てくるシカの個体数を推定する観測手法も開発しました。これらの手法により、尾瀬に生息するシカの個体数管理用の基礎データを提供できるばかりでなく、別の対象地域に生息するシカ以外の動物(害獣や希少動物など)の個体数や生息場所を特定できる可能性がある点で応用範囲が広く、生物多様性の分野においても有用性が高いと期待されます。
なお本研究は、独立行政法人 環境再生保全機構の環境研究総合推進費(JPMEERF20174006)により実施しました。
○発表内容:
<研究の背景>
尾瀬ヶ原・尾瀬沼は日本最大の山岳湿原として知られており、貴重な植物群落が生育し、2005年にはラムサール条約登録湿地に登録されています。また、5~7月の湿原植物の開花時期をピークに年間30~40万人の観光客が訪れるなど、人々に幅広くその自然環境・植生の価値が認められています。しかし、それまで生息していなかったシカが1990年代半ばから確認されるようになり、シカによる自然植生への影響が顕在化し、生態系への不可逆的な影響が懸念されています。このような状況を踏まえ、2008年に策定された「尾瀬国立公園シカ管理方針」の下でシカの捕獲事業の実施、継続的な植生被害などのモニタリング、防護手法の検討がなされ11年が経過しました。
これまで、尾瀬のシカの個体数に関する指標として、主には夜間にライトで照らし、反射でシカの目が光ることを利用して頭数を数えるライトセンサスによる目撃頭数が使われてきました。しかし、ライトセンサスは気象条件やシカの動きに強く影響を受け、データの観測誤差が大きくなることが課題でした。その他には、シカの生息密度の指標として、自動撮影カメラの撮影頻度とGPS首輪から得られた移動速度を元に推定する手法がありますが、カメラの設置やシカの捕獲に労力がかかります。また、糞塊調査、糞粒調査、区画法などもありますが、これらの手法は尾根や山の中を歩き回りシカやその痕跡を探すという手法であり、人による踏査が難しく、また環境保全の観点から可能な限り踏査を控えるべき尾瀬のような場所には適しません。
現在、シカによる尾瀬の植生被害を抑えるため、尾瀬の湿原内外において、シカの捕獲が実施されていますが、個体数がわからないため必要な捕獲数は設定されずに捕獲が行われています。このことから、人が環境に踏み込むことなく行える、シカの生息数を調査する手法が求められていました。
<研究の内容>
本研究では上記の問題を解決するために以下2つの研究成果を出すことに成功しました。
(1)複数マイクロフォンによるシカ時空間分布解析手法を開発
尾瀬の湿原に複数(3個以上)のマイクロフォンを設置し、シカの鳴き声(繁殖期のオスジカの”フィーヨフィーヨ”という鳴き声)データを継続して観測しました。同時にその音声データを数理的に解析し、シカの時空間分布を把握する手法を開発することで(図1)、複数のオスジカの動きを同時にかつ継続的に把握することに成功しました(図2)。
(2)ドローン(UAV)による尾瀬ヶ原全域のシカ個体数推定把握のための観測手法を開発
夜間に森林から湿原内に移動するシカの習性に着目し、熱赤外カメラを搭載した2台のドローンを約10平方キロメートルある尾瀬ヶ原の上空で飛ばし、全域に対してシカ個体数を把握する観測手法を開発しました(図3)。
成果(1)「複数マイクロフォンによるシカ時空間分布解析手法」は、従来の手法に比べ、保全対象地域に人が高頻度で入りこむことなく、少ない労力で、シカの時空間分布を精度高く継続的に把握できるという点で独創的であり、世界初のシステムといえます。これまではシカの鳴き声をとらえることは可能でしたが、場所をリアルタイムで把握できませんでした。本提案システムでは複数のマイクロフォンに届く鳴き声のタイミングのずれから、シカの位置をリアルタイムで特定でき、尾瀬ヶ原全域におけるシカの時空間分を把握できることが特徴です。
これまでに尾瀬ヶ原の各所に設置されている熱赤外センサによる自動撮影カメラの映像と、今回得られたシカの鳴き声の頻度から、オスジカ1頭が単位時間に鳴く平均回数を求めました。自動撮影カメラの映像から求めた、ある範囲に生息する雄の成獣とそれ以外のシカの比率も考慮に入れ、尾瀬ヶ原全域の個体数を推定したところ、422から769(平均437)頭のシカが生息していると推定されました。
将来的には、シカ以外の動物の鳴き声をデータベース化しておくことで、ある対象地域の動物の時空間分布を本手法を使って特定できる点で応用範囲が広く、生物多様性の分野においても有用性が高いと期待されます。
成果(2)「ドローン(UAV)による尾瀬ヶ原全域のシカ個体数推定把握のための観測手法」は、これまで10年間蓄積されてきたライトセンサスのデータと組み合わせることで、尾瀬ヶ原全域のシカ個体数を推定できる可能性を示しました。ライトセンサスで観測されたシカの個体数と、ドローンで観測された個体数を比較すると2.5から3.7倍(平均2.9倍)、ドローンの方が多く観測されます。この数値をライトセンサスで最も多く観測される5月(2019年188頭)に当てはめると、尾瀬ヶ原には470から696(平均626)頭のシカが生息していると推定されました。
将来的には、この2つの手法を組み合わせることで、より精度の高い個体数推定手法を開発し、尾瀬に生息するシカの個体数管理用の基礎データを提供し、植生被害を抑えるために必要な目標捕獲頭数の設定に貢献したいと考えています。
○発表雑誌:
<複数マイクロフォンによるシカ時空間分布解析手法について>
雑誌名: Sensors
論文タイトル: Detecting and tracking the positions of wild ungulates using sound recordings
著者: Salem Ibrahim Salem, Kazuhiko Fujisao, Masayasu Maki, Tadanobu Okumura and Kazuo Oki
<ドローン(UAV)による尾瀬ヶ原全域のシカ個体数推定把握のための観測手法について>
雑誌名: 日本リモートセンシング学会誌
論文タイトル: ライトセンサスとドローン空撮によるシカ個体分布特定結果の比較
著者: 牧 雅康、奥村 忠誠、沖 一雄
○問い合わせ先:
東京大学 生産技術研究所
特任教授 沖 一雄(おき かずお)
○添付資料:

図1:音声データからシカの時空間分布を把握する手法の原理
3つのマイクロフォン(Rec1、Rec2、Rec3)で、シカの位置を特定します。例えば、(a)のように、Rec 3が最も近い位置にあり、Rec 1が最も遠い位置にある場合、鹿の鳴き声はRec 3、 Rec 2、Rec 1の順に観測されます。鹿から最も近いRec3までの時間(T0)は不明ですが、Rec 2で同じ鳴き声を観測する時間差(Rec 3の後にRec 2で鹿の鳴き声を観測する時間遅延)は、録音時間から計算できます。
ここで、0.5m×0.5mグリッド(全体範囲3km×3km)に対してシカがそこで鳴いたかどうか試行錯誤により評価します((b)の青い点)。3つのマイクロフォンとグリッドの交点の座標は既知のため、各グリッドの交点と3つのマイクロフォンのそれぞれの距離は計算できます。
すなわち、各グリッドポイントから最も近いマイクロフォンを知ることができ、他の2つのマイクロフォンからの時間差に対応する距離を計算できます(c)。シカの実際のタイムラグ距離と各グリッドの交点から計算されたタイムラグ距離の間で二乗平均平方根誤差(RMSE)が計算され、これらの計算をすべてのグリッドの交点で繰り返すことにより、シカの位置に一致するか、シカの位置から非常に近い最小のRMSEを求めることができます。
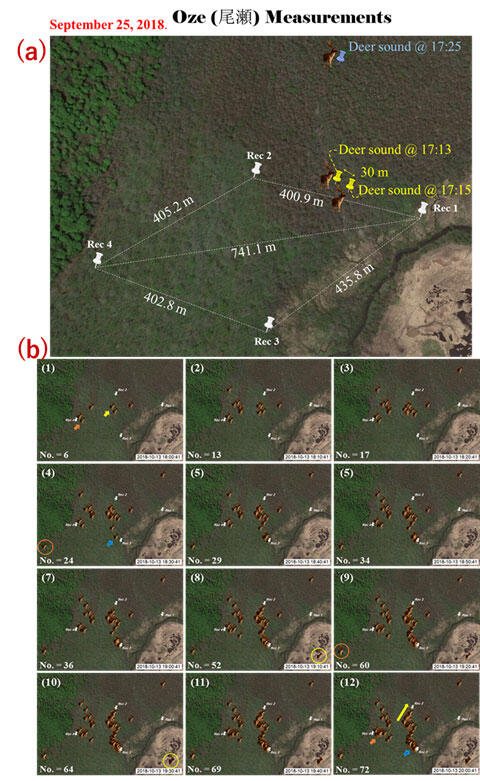
図2:複数のオスジカの動きを同時にかつ継続的に把握
(a)は2018年9月25日に観測した2頭のシカの鳴き声の時刻。黄色の文字は同じシカが移動して鳴いた時間と場所を示しています。(b)は観測開始時間(2018年10月13日18:00:00)から10分間隔でのシカの鳴き声の重ね合わせを示しています。 黄色とオレンジ色の円は、異なる時間での同じシカの鳴き声を示しています。 また、黄色、オレンジ、および青色の矢印は、それぞれのシカの移動経路を示しています。
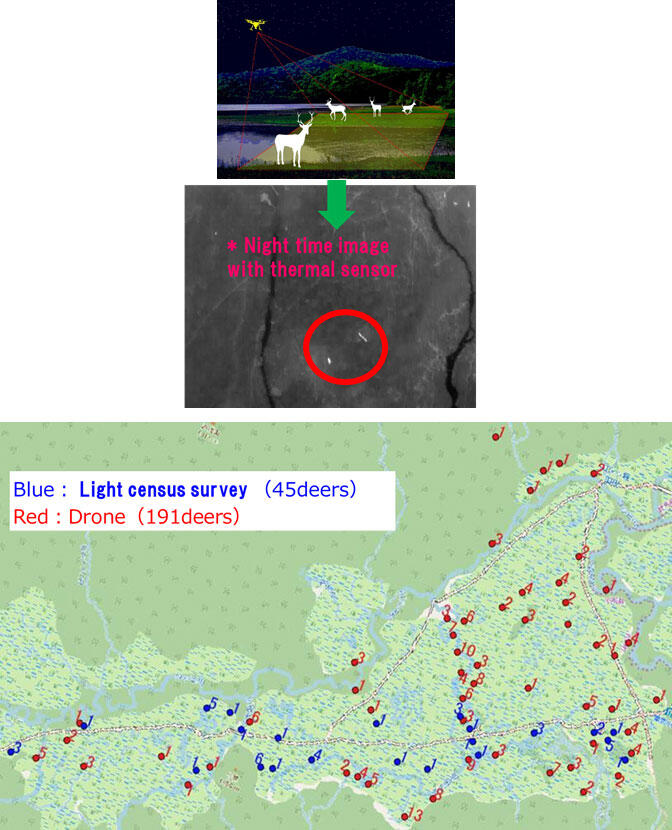
図3:ライトセンサスとドローンによる空撮によって特定できたシカの分布図
青の点がライトセンサスで、赤の点がドローンによる調査で確認されたシカの位置と個体数(ともに2019年8月6日実施)。

