")
2019/8/28 アメリカ合衆国ハーバード大学ヴィース研究所
・ ハーバード大学ヴィース研究所 Biologically Inspired Engineering、John A. Paulson School of Engineering and Applied Sciences (SEAS)とニューヨーク市立大学 Baruch College は、水圧を使用して、フェットチーネパスタのような指でクラゲ一匹を包み込み、損傷なく離す、とても柔らかな水中捕獲用のグリッパーを開発。既存の深海サンプリングデバイスよりさらに改良されており、今まではほとんど不可能であったクラゲや深海に生息する柔らかい生物を損傷なく捕獲することが可能。
・ 本技術により水中の生態系分析技術は大幅に向上し、科学にとっては重要だが観測不可能であった海洋生物の生態や遺伝的特徴等を、生物を水中からひきあげることなく研究できる。
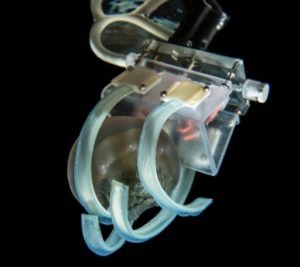
・ グリッパーには、フレキシブルで強靭な高分子ナノ繊維の層に接着した空洞の溝が付いた、薄く平らな帯状のシリコン製の六本の「指」がある。指は 3D プリントした長方形のプラスチックの「手のひら」にとりつけられていて、指の溝が水で満ちると、ナノ繊維でコーティングした方向に折れ曲がる。
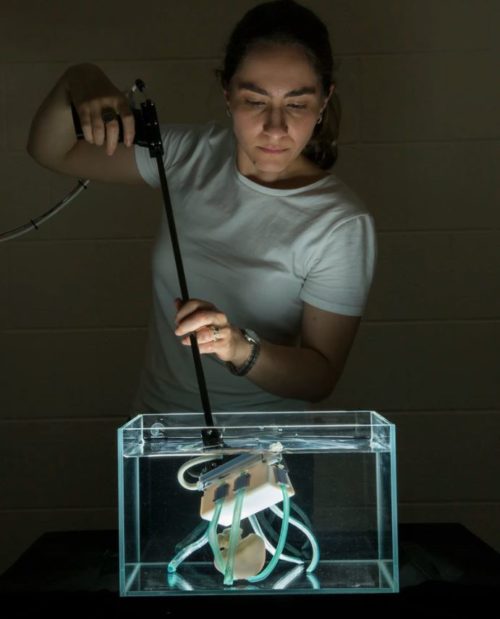
・ それぞれの指の圧力は人間のまぶたの 1/10 以下の 0.0455kPA ほどで、とても弱い。従来の柔らかい海洋使用グリッパーの圧力は、これとは対照的で、約 1kPA ととても強い。・ 研究者たちは、非常に柔らかなグリッパーを特製のハンドヘルドデバイスにはめ込み、水槽の中の人工的なシリコン製のクラゲをつかむ能力を試験、サンプルを採取する際の位置と、クラゲを捕獲する際の最適な角度や速度を確定した。その後、ニューイングランド水族館にて、本物のゴルフボール大のミズクラゲ、ブラバークラゲ、タコクラゲなどをグリッパーで掴む試験をした。・ グリッパーは、クラゲを一匹ずつデバイスの手のひらで掴むことができ、指の圧力が弱められるまで離さなかった。また、離された後のクラゲには、ストレスなどマイナス影響はみられなかった。グリッパーの指は、約 100 回開閉を繰りかえすことにも成功。
・ 海洋生態研究者たちは、アクセス不可能な環境に生息する繊細な生物の捕獲が可能な、人間の手のような繊細さを持つツールを長年待ち望んできた。新技術のグリッパーは、水中生物をより安全で簡単に採取し、研究の速度と質を向上させ、海洋生物の複雑な生態系について、より多くの全体像を提供。
・ 今後は、デザイン性を精査し、グリッパーで捕獲した時のクラゲの生理的な反応を研究して、ストレスを与えない方法を考察する。本研究の共同主任研究者であるヴィース研究所 の Robert Wood 氏と CUNY の David Gruber 氏は、Schmidt Ocean Institute の Designing the Future プロジェクトの共同主任研究者でもあり、2020 年には Falkor 調査船に乗り込んで、様々な水中型ロボットを研究開発する予定。
URL: https://wyss.harvard.edu/a-gentle-grip-on-gelatinous-creatures/
(関連情報)
Science Robotics 掲載論文(アブストラクトのみ:全文は有料)
Ultragentle manipulation of delicate structures using a soft robotic gripper
URL: https://robotics.sciencemag.org/content/4/33/eaax5425
<NEDO海外技術情報より>
Abstract
Here, we present ultragentle soft robotic actuators capable of grasping delicate specimens of gelatinous marine life. Although state-of-the-art soft robotic manipulators have demonstrated gentle gripping of brittle animals (e.g., corals) and echinoderms (e.g., sea cucumbers) in the deep sea, they are unable to nondestructively grasp more fragile soft-bodied organisms, such as jellyfish. Through an exploration of design parameters and laboratory testing of individual actuators, we confirmed that our nanofiber-reinforced soft actuators apply sufficiently low contact pressure to ensure minimal harm to typical jellyfish species. We then built a gripping device using several actuators and evaluated its underwater grasping performance in the laboratory. By assessing the gripper’s region of acquisition and robustness to external forces, we gained insight into the necessary precision and speed with which grasping maneuvers must be performed to achieve successful collection of samples. Last, we demonstrated successful manipulation of three live jellyfish species in an aquarium setting using a hand-held prototype gripper. Overall, our ultragentle gripper demonstrates an improvement in gentle sample collection compared with existing deep-sea sampling devices. Extensions of this technology may improve a variety of in situ characterization techniques used to study the ecological and genetic features of deep-sea organisms.
- Copyright © 2019 The Authors, some rights reserved; exclusive licensee American Association for the Advancement of Science. No claim to original U.S. Government Works


