化学刺激によるミミズ筋肉の持続的収縮を用いた弁(バルブ)
2019-07-08 理化学研究所,東京電機大学
ポイント
理化学研究所(理研)生命機能科学研究センター集積バイオデバイス研究チームの田中陽チームリーダー、東京電機大学の釜道紀浩准教授らの共同研究チーム※は、ミミズの筋肉組織を用いて、電気刺激によらない、化学エネルギーのみで動作する小型の弁(バルブ)を開発しました。
本研究成果は、電力が供給されにくい体内に埋め込むタイプの機械を制御するための装置などへの応用が期待できます。
共同研究チームは、ミミズの筋肉を用いたバルブを試作するため、土台となるマイクロ流体チップ[1]上に幅・深さ0.2mmの流路と直径3mmの液室(チャンバー)を作製しました。そして、そのチャンバーの上に筋肉の収縮力を伝えるプッシュバーを置き、さらにミミズ筋肉シートを載せて固定しました。これを用いて、電気刺激を用いた場合とアセチルコリン[2]による化学刺激を用いた場合において、バルブとしての性能を比較しました。その結果、電気パルス刺激では、シートが素早く収縮しバルブは閉じましたが、収縮を持続するには繰り返し電気刺激を与える必要がありました。一方、アセチルコリン刺激では、応答は緩やかながら、1回の刺激だけで1分以上持続的に止めることができたことから、このサイズのバルブとしては圧電素子[3]を用いた既存のものに匹敵する機能を持っていることを確認できました。また、刺激後にミミズの筋肉部分を緩衝液[4]で洗浄し、再刺激するサイクルを繰り返すことで、繰り返し使えることを実証しました。
本研究は、英国のオンライン科学雑誌『Scientific Reports』(7月8日号:日本時間7月8日)に掲載されます。
※国際共同研究グループ
理化学研究所 生命機能科学研究センター 集積バイオデバイス研究チーム
チームリーダー 田中 陽(たなか よう)
研究員 船野 俊一(ふなの しゅんいち)
研修生 野口 裕司(のぐち ゆうじ)
客員研究員 ヤシャイラ・ヤリクン(Yaxiaer Yalikun)
東京電機大学 未来科学部 ロボット・メカトロニクス学科 准教授 釜道 紀浩(かまみち のりひろ)
※研究支援
本研究は、日本学術振興会(JSPS)科学研究費補助金 挑戦的萌芽研究「ミミズ体壁筋を用いた微小流路内流体制御・物質輸送システムの創出(研究代表者:田中陽)」、および同新学術領域研究(ソフトロボット学公募研究)「オジギソウ搭載型植物機能利用スマートマシーン創発(研究代表者:田中陽)」などの支援を受けて行われました。
背景
エネルギーや環境・通信・医療など、現代の科学技術のあらゆる分野において省スペース・省エネルギーかつクリーンな機械システムの開発は喫緊の課題となっています。例えば、体内埋め込み型の装置や環境発電などの最先端研究分野においては、小型化に加え、外部からの電力供給に依存せず、材料自体も全て自然に還元される機械の構築が不可欠です。しかし、旧来の機械工学的発想では電源や送電・制御部などが必要で、高機能化には限界があります。
その解決手段の一つとして、田中チームリーダーらはこれまで、細胞や生体組織の機能を搭載したデバイス開発を提唱・実践してきました。栄養・酸素という化学エネルギーのみで機能発現でき、材料は自然に還元されるという点で、生物を材料とする機械は一つの理想形です。乗り物の歴史において、馬から馬車を経て自動車が発明されたように、生物機能と人工物の融合デバイスはそれ自体の有用性のみならず、理想の機械設計を見据えたモデルとしても重要と考えられます。
2016年には、このような考え方に基づき、水などの液体を送る機械であるポンプを生体組織の中でも制御性や収縮力に非常に優れたミミズの筋肉を使って作ることに成功しました注1)。これは、エネルギー源としては、生体の共通エネルギー源であるアデノシン三リン酸(ATP)、すなわち化学エネルギーを用いていますが、刺激には電気を用いており、完全に電力を用いていないとはいえませんでした。一方、筋肉は化学刺激だけで持続的収縮を起こすことができますが、その動きはゆっくりです。このような持続的収縮の場合、ポンプとしては使いにくいですが、水の流れを制御する装置であるバルブとしては使える可能性があります。そこで今回、このような発想のもと、ミミズの筋肉で動き、なおかつ電力を使わずに制御可能なバルブの開発を試みました。
注1)2016年10月17日プレスリリース「ミミズの筋肉を搭載した小型ポンプを開発」
研究手法と成果
バルブを作製するにあたり、共同研究チームはまず、化学刺激に対するミミズ筋肉シートの機械的特性を測定しました。フトミミズを輪切りにして開き、幅約1cm、長さ約2cmのシート状にして、神経伝達物質の一つであり筋肉を収縮させるアセチルコリン100mM(ミリモーラー)の緩衝液を加えて、シートの縮み長さと力の大きさを測りました(図1A、B)。
その結果、かなり時間変動は大きいものの、収縮率は最大40%、最大収縮の持続時間は2~5分でした(図1C、D)。また、刺激後緩衝液で洗浄することで、収縮力の時間変動のパターンには差が見られるものの、3回以上使えることを確認しました(図1E、F)。さらに、アセチルコリン濃度の効果を比較したところ、100mM以上ではあまり変わらず、10mMではやや下がり、1mM以下ではほとんど反応しないことが分かりました(図1G)。これらの結果から、化学刺激後の応答にはばらつきがあるものの、力や収縮率は一般の小型バルブの圧電素子と比較しても劣らず、バルブ作製に利用可能であると考えられました。
以上のデータに基づき、ミミズ筋肉を用いたバルブを設計試作し、原理検証を行いました。ミミズバルブのデザインは、図2のようなものとしました。以前のポンプデザイン注1)に近いものですが、液室(チャンバー)の体積を増減させるだけでなく、ミミズ筋肉収縮時には完全に流路を塞いで外側からの流れを遮断するものとなっています。これを実現するため、微細加工により作製した土台となるマイクロ流体チップ上に、幅・深さ0.2mmの流路と直径3mmのチャンバーを作製し、そのチャンバーの上に厚さ0.1mmの膜と筋肉の収縮力を伝えるプッシュバーを置き、さらにミミズ筋肉シートを載せてピンで固定しました。ミミズ筋肉シートとピン以外の構成要素は全てシリコーンゴム[5]で作製しました。
まず、バルブとしての動作確認と比較のため、電気刺激によるバルブ開閉確認実験を行いました。一定の電気刺激を与え続けると徐々にミミズ筋肉の収縮力は弱くなるため、持続的な収縮を実現するために短時間の刺激を繰り返すパルス電気刺激を与えました。外部からの送液圧力0.1kPaで流路に水を導入し、直流電圧6V、持続時間0.1秒、0.2秒間隔で刺激したところ、刺激中はミミズシートの収縮により水が止まること、またパルス刺激時間20秒、休止時間10秒のサイクルで3回以上繰り返し使用できることを確認しました(図3)。応答時間は約3秒でした。0.1kPaごとに送液圧力を上げたところ、2.5kPaまでは液が止まっていたことから、耐圧は2.5kPaと測定されました。
次に、アセチルコリンによる化学刺激でバルブを動作させる実験を行いました。電気刺激による動作確認実験と同様に、0.1kPaで送液し、アセチルコリン100mM溶液をミミズ筋肉シートに滴下したところ、応答時間は平均約42秒とかなり要するものの、最終的に液が止まり、その状態を1分以上持続させることができ、バルブ動作を確認することができました。この応答時間の長さは化学刺激に応答し、かつ膜を十分に押し下げて流路を塞ぐまでに時間がかかることを示しています。また、このバルブも刺激後緩衝液で洗浄し、再刺激というサイクルを繰り返すことで、3回以上は繰り返し使えることを確認しました(図4)。各サイクルで初期流速が違うのは、毎回洗浄後に完全に弛緩状態に戻るとは限らないからと考えられます。
また、このバルブは、1.5kPaまでの水圧の水を止めることができることが確認できました。したがって、本バルブを化学刺激のみで動作させた場合、電気刺激によるような素早い応答は得られませんが、1回の刺激でバルブが完全に閉じ、かつ十分な耐圧性能を持つこと、また繰り返し利用可能であるという点で、このサイズのバルブとしては圧電素子を用いた既存のものに匹敵する機能を持つことを実証できました。
今後の期待
例えば生体内の血管は、電気的な刺激なしでも、血液内の化学物質に応答し、収縮または弛緩して、自律的に血流を制御しています。このように、生体の優れた機能を人工的な機械に取り込むことは非常に有意義といえますが、本研究で試作したミミズバルブは、駆動源にも刺激にも電気を用いずに動きを外部から制御する装置としては、初めての例といえます。
今後、さらに何度まで繰り返し使えるか、またその耐久性や性能の時間変化などを計測するとともにデザインを最適化し、デバイス性能を強化していくことで、体内埋め込みデバイスはもちろん、薬効試験などの医学応用や外部からの電源供給を必要としない水流制御装置のモデルとしての工業応用などのさまざまな応用が考えられます。
原論文情報
Yo Tanaka, Shun-ichi Funano, Yuji Noguchi, Yaxiaer Yalikun, Norihiro Kamamichi, “A valve powered by earthworm muscle with both electrical and 100% chemical control”, Scientific Reports, 10.1038/s41598-019-44116-3
発表者
理化学研究所
生命機能科学研究センター 集積バイオデバイス研究チーム
チームリーダー 田中 陽(たなか よう)
東京電機大学 未来科学部 ロボット・メカトロニクス学科
准教授 釜道 紀浩(かまみち のりひろ)
報道担当
理化学研究所 広報室 報道担当
東京電機大学 総務部 企画広報担当
補足説明
-
- マイクロ流体チップ
- バイオ分析や化学分析(システム)をマイクロスケール化する目的で、溶液の混合、反応、分離、精製、検出などの化学操作をミクロ化したデバイスのこと。半導体製造技術(微細加工技術)を用いて基板に集積化する。
-
- アセチルコリン
- 神経伝達物質の1種で神経線維の末端から放出され、他の神経細胞や筋肉細胞に神経信号を伝える。
-
- 圧電素子
- 圧電効果を利用した受動素子のこと。圧電体に加えられた力を電圧に変換したり、電圧を力に変換したりする。アクチュエータ(駆動装置)、センサーとしての利用のほか、アナログ電子回路での発振回路やフィルタ回路にも用いられる。
-
- 緩衝液
- 弱酸とその塩などを溶かした水溶液で、多少濃度が変化したりしても pH が大きく変化しないようにした溶液。微生物の培養や化学物質の保存・分離などに用いられる。
-
- シリコーンゴム
- シリコーンを主成分とする樹脂。液体の状態に触媒を加えると、シリコーンの重合反応により硬化し、ゴム状になる。

図1 ミミズ筋肉シートの化学刺激応答の測定
(A)、(B)は今回の測定方法の模式図、(C)はt=0秒にアセチルコリンをかけ、120秒までのミミズ筋肉シートの収縮の様子を示す。(D)はシート幅(W、Cの白い点線)の時間変化をプロットしたもの。(E)は収縮力の時間変化をプロットしたもので、刺激・洗浄のサイクルを3回目まで行って測定したもの。(F)、(G)はそれぞれサイクル回数およびアセチルコリン濃度と刺激後2分間平均の収縮力の関係。
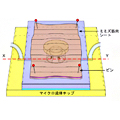
図2 ミミズバルブの構造と送液原理
(A)はミミズバルブを俯瞰した模式図、(B)は(A)のX-Y断面図を表す。微細加工技術によりバルブの土台となるマイクロ流体チップ上に微細流路とバルブチャンバー(液室)を作製し、このチャンバーの上に、膜と筋肉の収縮力を伝えるプッシュバーという構造体を置き、さらにその上にミミズ筋肉シートを載せてピンで固定する。マイクロ流路内は外側から定圧で水が流れており、ミミズ筋肉シートに化学刺激を与えて持続的に収縮させることで、流路とチャンバーの間の穴が塞がり、流れが止まる。
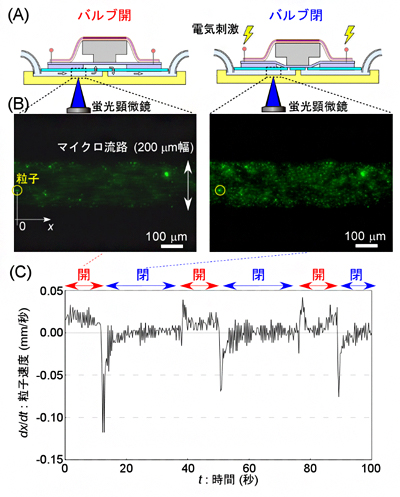
図3 パルス電気刺激によるバルブ動作の実証実験
(A)はバルブ動作を示す模式図。(B)はバルブ開状態(刺激なし)および閉状態(刺激中)におけるマイクロ流路内の流れを、直径1マイクロメートル(μm、1μmは1,000分の1mm)の蛍光ポリスチレン微粒子(緑の輝点)で可視化して蛍光観察・撮影した写真。(C)はB写真中丸で囲んだ粒子の速度の時間変化をプロットしたもの。グラフ上部に粒子が動いているとき(開)、止まっているとき(閉)の各状態を表示している。パルス刺激時間20秒、休止時間10秒のサイクルで、3回以上繰り返し使用できることが分かった。
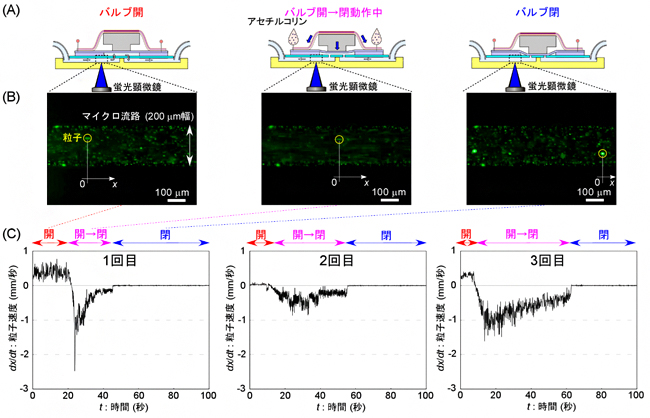
図4 化学刺激によるバルブ動作の実証実験
(A)はバルブ動作を示す模式図、(B)はバルブ開状態(刺激前)、バルブが開から閉状態に移行する動作中の状態(刺激中~後)、および閉状態(刺激後)におけるマイクロ流路内の流れを蛍光観察・撮影した写真。(C)はB写真中丸で囲んだ粒子の速度の時間変化をプロットしたもので、刺激・洗浄のサイクルを3回目まで行って測定したもの。グラフ上部に粒子が右に動いているとき(開)、逆流状態(開→閉)、止まっているとき(閉)の各状態を表示している。刺激後緩衝液で洗浄のサイクルを3回目まで繰り返したときのグラフ。

