2024-12-23 産業技術総合研究所
ポイント
- 適切な外力をタイミングよく身体に加えて運動訓練の効率を向上
- 運動訓練の効率を上げる外力の加え方とタイミングの組み合わせを解明
- 動作アシストするロボットの制御方法の設計や徒手的な補助を行う運動訓練法の改善に向けた指針

アシスト動作の方法とタイミングの組み合わせに応じて訓練効率が変化
概要
国立研究開発法人 産業技術総合研究所(以下「産総研」という)人間情報インタラクション研究部門 金子秀和 主任研究員と人間拡張研究センター 鮎澤光 上級主任研究員は、リハビリテーション(以下、リハビリ)において、運動訓練中のラットを対象にアシスト動作の方法とタイミングが訓練効率に与える影響を明らかにしました。
ロボット技術を用いて被訓練者の身体に外力を加えるリハビリを想定し、訓練中のラットにアシスト動作の方法とタイミングを変えた4種類の介入を行い、訓練効率の評価を行いました。その結果、同じアシスト動作の方法でもタイミングが異なれば訓練効果に差が生じることを明らかにしました。
この知見は、ロボット技術をリハビリに応用する際のアシスト動作機器の制御方法の設計や徒手的な補助を行う運動訓練法を改善するための指針を与えるものです。
なお、この技術の詳細は、2024年12月13日に「IEEE Transactions on Neural Systems and Rehabilitation Engineering」に掲載されました。
開発の社会的背景
脳血管疾患の患者数は約170万人にのぼり(厚生労働省「患者調査」令和2年患者調査)、多くの患者が、脳機能障害で失った身体機能を回復するためにリハビリ訓練を必要としています。さまざまなリハビリ訓練法が提案されていますが、その中の一つに理学療法士などの訓練者が被訓練者(患者)の動きを補助する「徒手療法」という手法があります。その効果は、個々の訓練者の技量に大きく依存しているのが実情です。これは、訓練者ごとに介入方法やそのタイミングが微妙に異なり、再現性の低いことが原因と考えられます。この問題を解決するためには、タイミングよく身体に外力を加えることが可能なロボット技術の活用が有効です。
これまで、ロボット技術を用いたリハビリ訓練法では、アシスト的な介入が効果的であると考えられていました。しかし、どのタイミングでどのような外力を身体に加えると訓練効果が高まるかについては科学的に解明されておらず、一般に定まった方法は知られていません。
研究の経緯
産総研は、ニューロリハビリ技術の研究開発の一環としてロボティックリハビリ技術の高度化を目指し、片側大脳皮質損傷モデルおよび健常モデルに対して、アシスト動作機器の効果を評価できる学習実験モデルを用いて検討してきました(文献[1][2]および2017年1月13日 産総研プレス発表)。これまで、訓練者が被訓練者の動きをサポートする徒手療法を想定して、運動訓練中のラットの前肢に正解となる動作を妨げるような外力を加えると運動訓練の効率が高まることを明らかにしてきました。
今回、徒手療法よりも精度よく被訓練者の動作タイミングに合わせて介入可能なアシスト動作機器を用いた訓練を導入して、ラットの動作タイミングを予測し、それに合わせて外力を与えた場合の効果についても、これまでの結果と合わせて検証しました。
なお、本研究開発は、独立行政法人 日本学術振興会(JSPS)「科学研究費助成事業 JP22500495、JP26350648、JP18K10808、 JP21K11331」による支援を受けています。
研究の内容
図1に本研究で用いたラット用学習実験装置を示します。訓練を始めるにあたり、ラットに前肢を使って左右2本のレバーを同時に押し下げさせ、報酬用飲口を咥えさせた状態で待機させます。ラットの前肢が置かれるレバーには押力センサーが備わっており、ラットがレバーから前肢を離そうとするタイミングを検出できます。また、レバー駆動装置によって前肢を強制的に持ち上げることが可能です。これらの機構を使って、アシスト動作を加えた訓練を実施しました。
訓練は以下の手順で行います。まず、ランダムに左右どちらか一方の前肢に空気を吹きかける空圧刺激を与えます。空圧刺激に対して、ラットが正解となる側の前肢をレバーから持ち上げて離せば報酬として砂糖水を与え、反対側の前肢を離した場合は不正解として報酬を与えません。また、不正解だった場合、訓練を促進させるためにもう一度同じ側の前肢に空圧刺激を与えた後、レバー駆動装置を用いてラットの前肢のいずれかを強制的に持ち上げるアシスト動作を行います。なお、1匹のラットに対し、刺激を与えた側の前肢を持ち上げた場合を正解とする訓練、および逆側の前肢を持ち上げた場合を正解とする訓練を、それぞれエラー率が15%未満となるまで実施し、訓練が進捗する様子を観察しました。
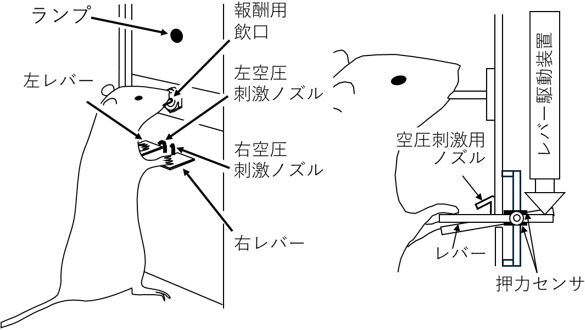
図1 学習実験装置の概要。
※原論文の図を引用・改変したものを使用しています。
実験ではアシスト動作として、2種類の動作と2種類のタイミングを組み合わせた4通りの条件を設定しました。アシスト動作の一つは、正解の側の前肢を持ち上げる動作で、もう一つは逆側の前肢を持ち上げる動作です。タイミングについては、一つは空圧刺激を与えた一定時間(約0.2秒)経過後にアシスト動作を行い、もう一つは、刺激を受けたラットが自発的に前肢を持ち上げようとする応答動作を押力センサーで検知し、それに同期したタイミングでアシスト動作を行いました。
訓練4日目および5日目のデータから算出された成績を図2に示しました。一定時間経過後のタイミングで正解側と逆のアシスト動作を行った場合(●、赤囲い)と、ラットの応答動作に同期したタイミングで正解側のアシスト動作を行った場合(△、青囲い)に、エラー率の低下と応答時間の短縮といった訓練成績の向上が見られました。
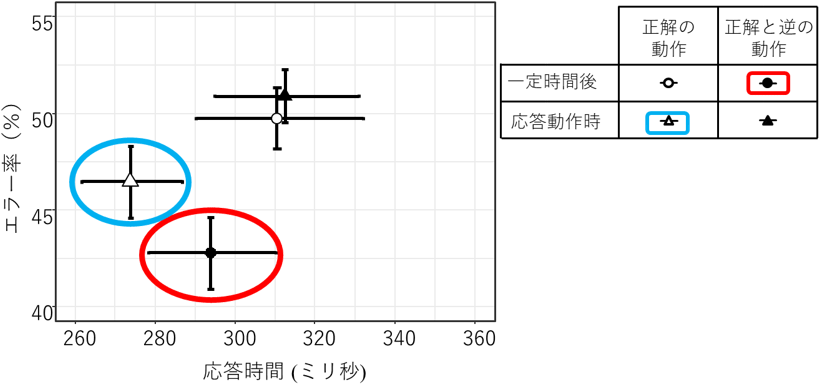
図2 訓練開始後4、5日目のデータから算出された成績。
※原論文の図を引用・改変したものを使用しています。
タイミングの違いで、訓練成績を向上させるアシスト動作が正反対になるという結果は、アシスト動作がどの神経活動を活性化するかを考え、条件付け理論に基づいて空圧刺激と応答動作の関係がどのように変化するか考えることによって解釈できます。
まず、ラットが自主的に前肢を上げてレバーから離す場合、反対側の前肢ではバランスを取るためにレバーを押し下げる神経活動が活性化されます。一方、レバー駆動で強制的に前肢を持ち上げると体幹が後ろに動かされ、反射経路を通して、持ち上げられた前肢ではレバーを押し下げる神経活動が活性化されます。同時に、反対側の前肢ではその自重によって前肢が引き伸ばされて前肢をレバーから持ち上げる神経活動が活性化されます(図3)。つまり、レバー駆動によって正解のアシスト動作が入ると正解と逆の動作を起こす神経活動が活性化され、逆に、正解と逆のアシスト動作が入ると正解の動作を起こす神経活動が活性化されることになります。
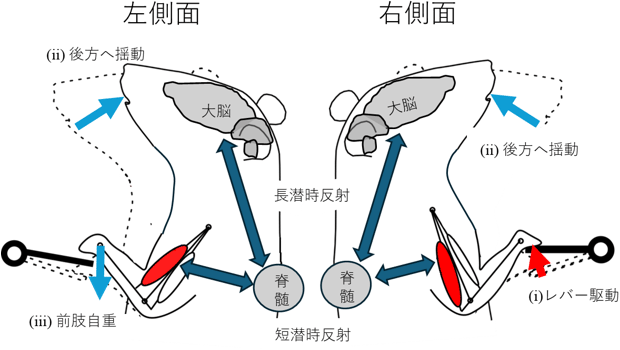
図3 レバー駆動によって活性化されるラット前肢に関する神経活動。
ⅰ)右前肢がレバー駆動によって持ち上げられ、ⅱ)体幹が後方に揺動し、ⅲ)左前肢が引き伸ばされ、左前肢を持ち上げる神経活動が活性化される。
※原論文の図を引用・改変したものを使用しています。
次に、条件付け理論では、ある刺激と身体の反射応答を引き起こす別の刺激を一定の時間間隔で与えていると、ある刺激を与えるだけで反射応答が引き起こされるようになります。この理論にしたがえば、空圧刺激から一定時間経過後のタイミングで正解と逆の動作を繰り返し強制することで、正解動作を起こす神経活動が活性化され、訓練成績が向上したと考えられます(図2および図4の赤囲い)。一方、ある刺激と反射応答を引き起こす別の刺激を無秩序な時間間隔で与えていると、ある刺激を与えた際に生じていた反射応答が起きにくくなります。したがって、ラットの応答動作に同期したタイミングで正解動作を繰り返し強制することで、空圧刺激後から無秩序な時間間隔で正解と逆の動作を起こす神経活動を活性化したことになり、不正解動作を起こしにくくなることによって、訓練成績が向上したものと考えられます(図2および図4の青囲い)。その他のアシスト動作では不正解動作が起きやすくなる効果(図2の○)、正解動作を起こしにくくなる効果(図2の▲)を生じることによって訓練が遅延したと考えられます。
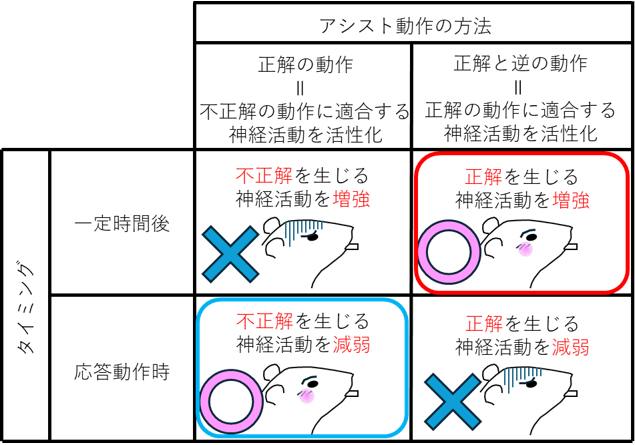
図4 アシスト動作の方法とタイミングの組み合わせ。
今回得られた知見は、効果的なアシスト動作機器の制御方法を設計する上で、重要な指針となります。この知見は、これまで訓練者の技量に頼っていた徒手的な運動療法において、訓練法の最適化および再現性の向上につながります。この指針に基づき、リハビリ訓練の効率が向上すれば、回復期間の短縮や介入方法の見直しによる訓練効果の向上が期待できます。
今後の予定
今後は、脳活動を計測することによって神経メカニズムを解明し、得られた知見をヒトにも適用可能となるリハビリ機器の開発を進めて行く予定です。また、これまでは単純な応答動作を対象としてきていますが、単純な動作が組み合わされた複雑な動作に対しても、同様の介入方法が有効であるかを検証します。これらにより、神経科学的な知見を活かしたニューロリハビリ技術の確立に貢献します。
論文情報
掲載誌:IEEE Transactions on Neural Systems and Rehabilitation Engineering
論文タイトル:Forced Movements Facilitate Reversal Learning in Rats: Findings from a Rat Robotic Rehabilitation Model
著者:Hidekazu Kaneko and Ko Ayusawa
DOI:10.1109/TNSRE.2024.3506600
参考文献
[1] H. Sano, H. Kaneko, Y. Hasegawa, H. Tamura, and S. S. Suzuki, “Facilitation of learning and rehabilitation in rats by inducing response-like movement”, Adv. Biomed. Eng., vol. 2, pp. 72–79, 2013.
[2] H. Kaneko, H. Sano, Y. Hasegawa, H. Tamura, and S. S. Suzuki, “Effects of forced movements on learning: Findings from a choice reaction time task in rats”, Learn. Behav., vol. 45, pp. 191–204, 2017.
用語解説
- アシスト動作機器
- 身体を動かしたいと思ったとき、その動きを手助けしてくれるような機器。被訓練者があまり力を発揮しなくても所望の動作を行える。
- 徒手療法
- 訓練者が被訓練者の身体運動を補助したり、負荷を与えたりして、身体運動の訓練効果を高めようとする機能回復訓練法。
- ニューロリハビリ技術
- 神経科学的な知見を活かして、脳や脊髄などの神経系の損傷による後遺症としての身体機能や認知機能の低下を、効率良く回復させようとするリハビリ技術。
- ロボティックリハビリ技術
- ロボット技術を用いて、患者の身体に外力を加えるなどしてリハビリ訓練の効果を得ようとするもの。
- 片側大脳皮質損傷モデル
- 左右片側の大脳皮質において、前肢の感覚機能や運動機能を司っている領域を損傷したラット。脳損傷がある側とは反対側の前肢への感覚刺激に対する反応やその前肢を動かして応答しなければならない課題の学習が遅くなる。
- 押力センサー
- ラットが前肢でレバーを押し下げる力を計測するためのセンサー。
- レバー駆動装置
- ラットの前肢に上向きの外力を加えて強制的に応答動作を引き起こす装置。課題遂行中、ラットはレバーを押し下げた状態から、空圧刺激後に前肢を上げてレバーから離す動作で応答するが、応答する前に押し下げられている状態のレバーを上向きに押し上げる装置。
- 条件付け理論
- ”ベルを鳴らした後に犬に餌を与えることを繰り返すと、ベルを鳴らしただけで犬は唾液を分泌するようになる(パブロフの犬)”という現象がある。これは、餌とは関連しない刺激であるベルの音と餌に対して唾液を分泌するという反射応答との関係が獲得されて起こるもので、逆に両者の同時性や時間的な一定性が崩れると関係が弱まる。ここでは、空圧刺激とレバー駆動によって引き起こされる反射経路を通じた神経活動との間に一貫した時間的関係がなりたつ場合とそうでない場合とで両者の関係が強まったり弱まったりすることが想定される。
- 反射経路
- 筋肉や腱などの末梢器官への刺激がきっかけとなって比較的短時間に生じる身体応答を反射と呼ぶ。そのような反射には、脊髄内の少数の神経細胞を介して伝達されるものと、より高次の中枢の複数の神経細胞を介して伝達されるものが両方含まれている。反射経路は、このような反射に関わる神経活動の伝達経路のこと。ここでは、レバー駆動装置によって前肢を急に持ち上げたとき、それによって引き伸ばされた筋肉を自ら収縮させようとする伸張反射に関わる経路。
お問い合わせ
産業技術総合研究所
")
