2021-10-13 東京大学
発表のポイント
- 神経障害を持つラットが不安定な姿勢を維持する動作を解析することで、神経系の姿勢安定化の特徴に迫る新しい手法を構築しました。
- 下オリーブ核障害ラットでは、重心が大きくゆっくりと振動する動作が現れることを発見しました。
- ラットの動作を再現する計算モデルを構築し、姿勢安定化機構に迫る手法を構築しました。
- 下オリーブ核障害ラットでは、身体の柔軟性と傾きの修正機能の低下が現れることを発見しました。
発表概要
電気通信大学 大学院情報理工学研究科 機械知能システム学専攻の舩戸徹郎准教授、東京大学 大学院総合文化研究科 広域科学専攻の柳原大教授らの研究グループは、京都大学の研究グループと共同で、運動の内部モデル[1]生成に関わる下オリーブ核[2]の障害が、身体の柔軟性と傾きの修正機能を低下させることで、姿勢維持機能の低下が生じることを、ラットの実験と計算モデルによって解明しました。この成果は英国科学誌Scientific Reportsに掲載されました。
研究の背景
運動を行う際に、自分が運動するイメージをはっきりと持つことが、よい運動成果につながると言われます。では運動のイメージを作る器官が働かなくなったら、運動にどのような影響がでるでしょうか?
運動中の自身の身体のイメージにあたる内部モデルは、下オリーブ核と呼ばれる器官を通して小脳内に作られます。この下オリーブ核に障害がある患者さんは、運動や姿勢が不安定になることがわかっていました。一方で、下オリーブ核の障害がどのように運動に影響し、なぜ不安定になるのかについてはわかっていませんでした。我々は、後ろ足の二足で直立するラットと計算モデルを用いてこの問題を調べました。
研究手法
ラットに二足の不安定な状態で直立をしてもらうと、ラットは倒れないように身体を動かします。高い位置から水を与えながらトレーニングを行うことで、ラットは二足の状態で数分間の直立が維持できるようになりました。下オリーブ核に障害を持つラット(下オリーブ核障害ラット)でも一定時間直立が維持できるようになりましたが、直立中に突然身体が振動しはじめ、倒れてしまう様子も見られました。健常なラットと下オリーブ核障害ラットのそれぞれの重心の動きを計測し、安定化のための動きの特徴を調べました。
我々はさらにラットの身体の動きを表す運動方程式とその姿勢安定化機構(フィードバック制御[3])からなる計算モデルを作り、ラットの動きの特徴、特に健常なラットと下オリーブ核障害ラットの間で異なる動きの特徴が、姿勢安定化機構のどのような特徴の変化(フィードバックゲイン[4]の変化)によって再現されるのかを、コンピュータシミュレーションを用いて調べました。
研究成果
ラットの直立中の重心の動きを調べたところ、健常なラット、下オリーブ核障害ラットともに、1Hz付近にピークを持つ(つまり、1秒間に1回程度振動する)動きがみられました。さらに下オリーブ核障害ラットでは、ピークの周波数は健常ラットに比べて小さくピークの大きさが大きい(つまり、身体がゆっくりと大きく振動する)ことがわかりました(図1)。
シミュレーションによって計算モデルの動作を生成し、ラットの動き、特にラットの周波数がシミュレーションによって再現されるように計算モデルの特徴量(フィードバックゲイン)を探索しました。その結果、下オリーブ核障害ラットで見られた周波数の変化は、1:身体のばね剛性の上昇(比例制御ゲイン[4]の上昇)と、2:大きく傾いた身体を修正する安定化機能の低下(非線形制御ゲイン[4]の低下)を反映していることが分かりました(図2)。身体のばね剛性の上昇は、動きの柔軟性を低下させ、それにより直立の動きには前後の振動が起こりやすくなります。さらに大きく傾いた身体が修正できなくなることで、下オリーブ核障害ラットは、健常ラットに比べて倒れやすくなったことがわかりました。我々は、内部モデル生成の機能が低下したことが、大きく傾いた身体を修正できなくなった要因であると考えています。
 図1:下オリーブ核の障害によるラットの直立動作の変化
図1:下オリーブ核の障害によるラットの直立動作の変化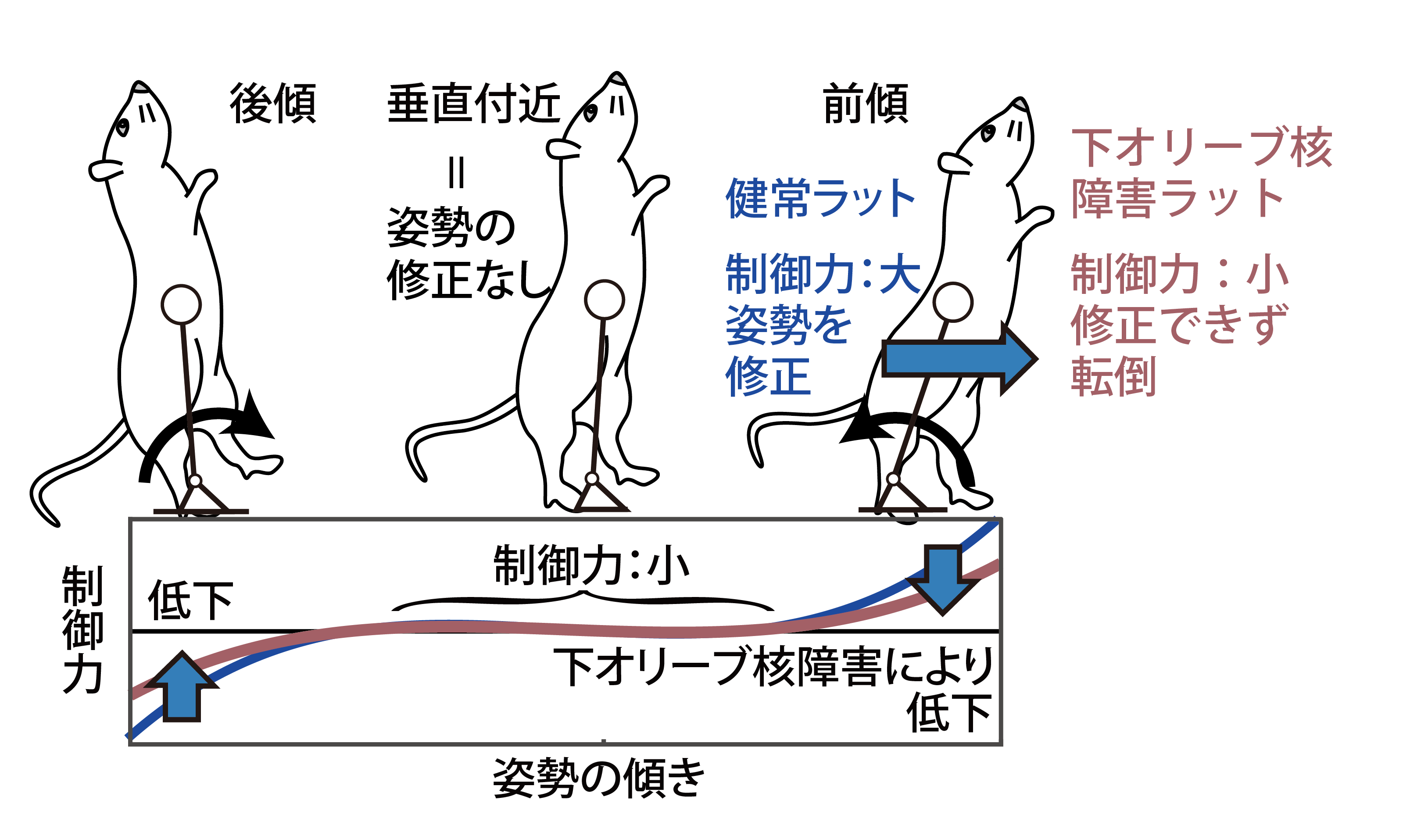 図2:下オリーブ核の障害による安定化制御力の低下
図2:下オリーブ核の障害による安定化制御力の低下
今後の期待
本研究では、下オリーブ核の障害がどのように姿勢の不安定化を生じさせるのかをラットを用いて調べました。下オリーブ核及び小脳系の障害は、脊髄小脳変性症などの疾患においてみられ、これらの患者さんでは姿勢の安定化が困難になることが知られています。本研究の成果はこれらの患者さんがなぜ姿勢機能が低下しているのかという原理の解明につながり、それを基にした効果的なリハビリ手法の確立につながると考えています。
さらに、本研究の成果は、内部モデル生成に関わる神経系(下オリーブ核)が姿勢の安定化にどのように関わっていたのかを計算モデルを用いて説明したはじめての研究です。運動には、現在の状態だけでなく、将来の状態を予測した行動が必要となる状況があります。例えば、立ち上がる際には、立った後に倒れないようにあらかじめ姿勢を計画する必要があり、また平地から階段を上る際には階段に差しかかる前に動きと姿勢を変える必要があります。これらの姿勢の予測には、内部モデルが必要となりますが、これまで内部モデルと姿勢制御の関係を、計算モデルでどのように再現すべきかわかっていませんでした。本研究の成果と計算モデルの手法は、この内部モデルが神経系の姿勢制御で使われるメカニズムを解明する糸口になると期待しています。
外部資金情報
本研究の一部は科学研究費補助金(基盤研究(B) 18H01393、基盤研究(C) 18K10955、新学術領域研究19H05728)の補助により行われました。
用語説明
[1] 内部モデル:運動指令とそれによって生じる動作との関係を表す情報。小脳内に作られ、運動目標を達成するための運動指令の生成などに使われる。
[2] 下オリーブ核:延髄の腹側にある神経細胞群。運動中の誤差情報を小脳のプルキンエ細胞に伝送し、プルキンエ細胞における運動学習・内部モデルの生成に寄与している。
[3] フィードバック制御:感覚神経から時々刻々と得られる情報と目標の姿勢状態との間の誤差が小さくなるように動作指令を与えて安定化を行う方法。感覚情報をどのように用いるかに応じて、比例制御、非線形制御などと呼ばれる。
[4] フィードゲイン:誤差情報を何倍して動作指令に用いるかを決める係数であり、フィードバック制御の大きさ(強さ)を表す。フィードバック制御の種類に応じて、比例制御ゲイン、非線形制御ゲインなどと呼ばれる。
論文情報
Tetsuro Funato, Yota Sato, Yamato Sato, Soichiro Fujiki, Shinya Aoi, Kazuo Tsuchiya, Dai Yanagihara, “Quantitative evaluation of posture control in rats with inferior olive lesions,” Scientific Reports: 2021年10月13日, doi:10.1038/s41598-021-99785-w.
論文へのリンク (掲載誌)

